Тахометр + температура двигателя на Arduino для МиниМото
Купил я сыну в прошлом сезоне его первый мотоцикл. Радости не было предела.
Катались мы катались, всё хорошо, но т.к. на минибайках нет ни спидометра, ни тахометра, ничего, пришла идея это исправить. Есть конечно же в продаже готовые варианты, но весь интерес в том, чтобы попробовать сделать что-то самому, а купить можно всегда. Что у меня из этого вышло, читайте ниже.
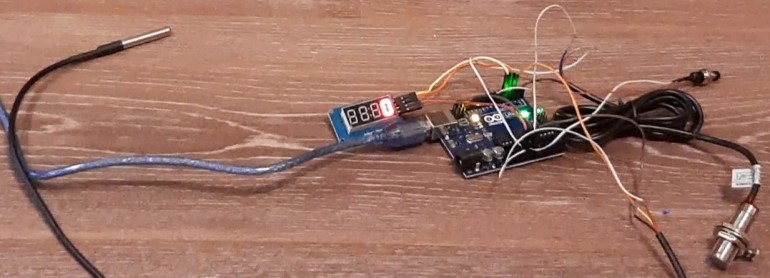
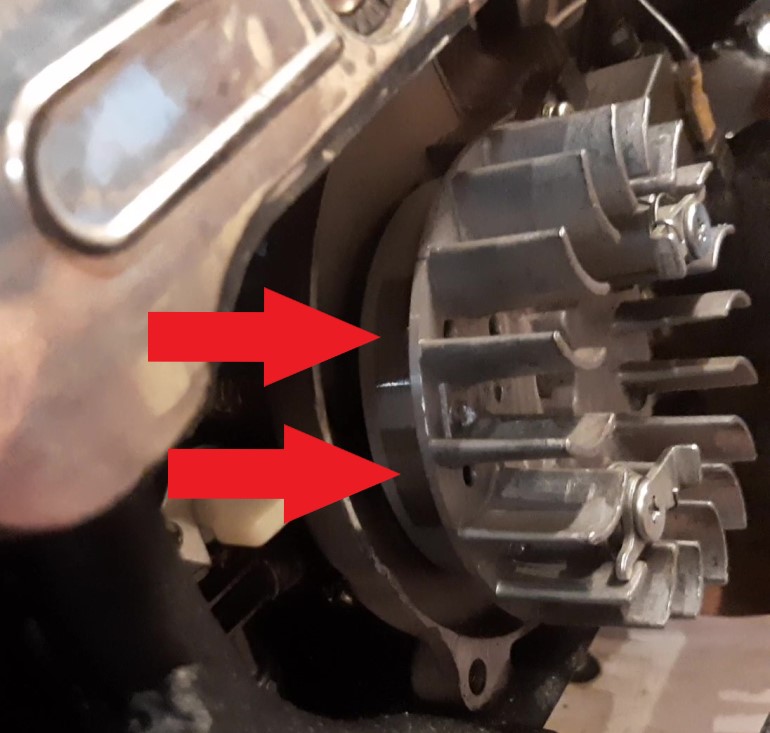
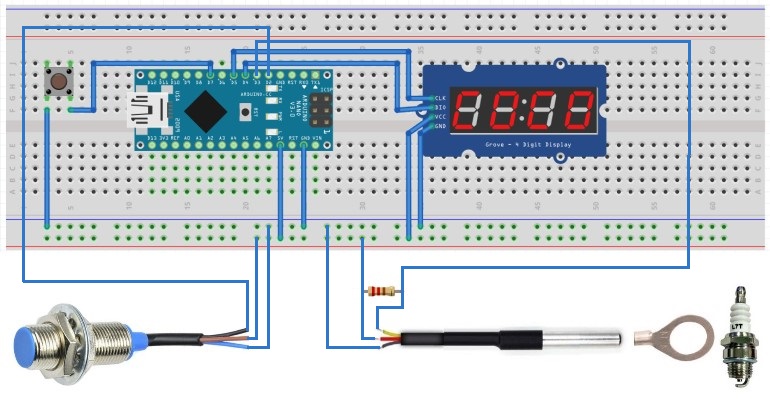
Для фиксации оборотов двигателя использую датчик Холла NJK-5002C, при появлении в зоне срабатывания постоянного магнита датчик на выход подаёт сигнал. Магнитные полосы присутствуют на маховике двигателя, приклеивать/прикручивать магниты не нужно.
Для определения температуры двигателя использую водонепроницаемый датчик температуры DS18B20, который вставляется в специальную шайбу под свечу зажигания.

В моей реализации устройства по кнопке циклически переключаются режимы: при включении отображаются обороты, нажали на кнопку — обороты сменились на температуру, ещё раз нажали — температура сменилась на обороты и т.д. по кругу.
Arduino UNO/Nano
Датчик Холла NJK-5002C
Датчик температуры DS18B20
7-ми сегментный дисплей на чипе TM1637
Кнопка без фиксации
Резистор 100 Ом
Макетная плата
Провода
Поясню один момент в скетче, для чего я использую таймер: так вот, получить данные температуры с датчика (sensor.getTemp()) мы можем только отправив запрос (sensor.requestTemp();) и подождав (delay(1000);). Как всегда delay всё портит и если без таймера опрашивать кнопку в loop, то переключив один раз режим на отображение температуры (сработает delay) — сменить режим мы уже не сможем, т.к. микроконтроллер ждёт и нажатие на кнопку не обработает. Чтобы этого избежать я и опрашиваю кнопку по таймеру.
На видео показано как это всё работает, для установки на мотоцикл я немного не угадал с диаметром датчика NJK-5002C, который будет устанавливаться в корпус инерционного стартера и чтобы всё было ровно, диаметр нужен поменьше, планирую использовать датчик LJ8A3 или LJ6A3. К следующему мотосезону постараюсь всё оформить в какой-нибудь корпус и установить на МиниМото, соответственно по готовности дополню статью фотками и видео.
Ссылка на скетч и библиотеки.
Для тех, кому интересны покатушки на МиниМото, ссылка на канал моего сына на YouTube.
Тахометр на Arduino
Тахометр представляет собой счетчик числа оборотов в минуту (RPM counter). Существует два типа тахометров: механические и цифровые.

Общие принципы работы проектируемого тахометра
В этом проекте мы будем создавать цифровой тахометр на основе платы Arduino и модуля инфракрасного датчика для обнаружения вращения и подсчета числа оборотов любого вращающегося объекта. Принцип его действия основан на том, что инфракрасный передатчик излучает инфракрасные лучи которые затем отражаются обратно к инфракрасному приемнику и затем инфракрасный модуль генерирует импульс на своем выходе который обнаруживается контроллером Arduino когда мы нажимаем кнопку start. Он осуществляет счет в течение 5 секунд.
После этих 5 секунд плата Arduino рассчитывает число оборотов в минуту по следующей формуле:
RPM= Count x 12 для одиночного вращающегося объекта.
Но поскольку в этом проекте для демонстрации работы схемы мы используем потолочный вентилятор, то мы должны внести некоторые изменения в приведенную формулу:
RPM=count x 12 / objects
где
objects – число лопастей в вентиляторе.
Обобщенная структурная схема работы устройства представлена на следующем рисунке.

Необходимые компоненты
Работа схемы
Схема тахометра на основе платы Arduino представлена на следующем рисунке.
 Схема содержит плату Arduino Pro Mini, модуль инфракрасного датчика и ЖК дисплей. Плата Arduino управляет всем процессом функционирования устройства: считывание импульса с выхода модуля инфракрасного датчика, вычисление частоты вращения (в оборотах в минуту) и передача значения этой частоты на ЖК дисплей. Инфракрасный датчик используется для обнаружения объекта. Мы можем регулировать чувствительность данного датчика с помощью встроенного в него потенциометра. Модуль инфракрасного датчика состоит из инфракрасного передатчика и фотодиода, который обнаруживает инфракрасные лучи. Инфракрасный передатчик излучает инфракрасные лучи, когда эти лучи падают на поверхность, они отражаются от нее и улавливаются фотодиодом (более подробно об этих процессах можно прочитать в статье про робота, движущегося вдоль линии). Выход фотодиода подключен к компаратору, который сравнивает значение с выхода фотодиода с опорным напряжением и результат сравнения выдает на плату Arduino.
Схема содержит плату Arduino Pro Mini, модуль инфракрасного датчика и ЖК дисплей. Плата Arduino управляет всем процессом функционирования устройства: считывание импульса с выхода модуля инфракрасного датчика, вычисление частоты вращения (в оборотах в минуту) и передача значения этой частоты на ЖК дисплей. Инфракрасный датчик используется для обнаружения объекта. Мы можем регулировать чувствительность данного датчика с помощью встроенного в него потенциометра. Модуль инфракрасного датчика состоит из инфракрасного передатчика и фотодиода, который обнаруживает инфракрасные лучи. Инфракрасный передатчик излучает инфракрасные лучи, когда эти лучи падают на поверхность, они отражаются от нее и улавливаются фотодиодом (более подробно об этих процессах можно прочитать в статье про робота, движущегося вдоль линии). Выход фотодиода подключен к компаратору, который сравнивает значение с выхода фотодиода с опорным напряжением и результат сравнения выдает на плату Arduino.

Выход модуля инфракрасного датчика напрямую подключен ко контакту 18 (A4) Arduino. Vcc и GND подсоединены к контактам Vcc и GND arduino. ЖК дсиплей подключен к плате Arduino в 4-битном режиме. Его управляющие контакты RS, RW и En напрямую подсоединены к контактам 2, GND и 3 Arduino. Контакты данных D4-D7 подключены к контактам 4, 5, 6 и 7 Arduino. В схеме также присутствует кнопка, которую необходимо нажать для подсчета числа оборотов. Наш тахометр на основе платы Arduino подсчитывает число оборотов в течение 5 секунд а потом по вышеприведенной формуле осуществляет пересчет этого значения в число оборотов в минуту. Кнопка подключена к контакту 10 Arduino.
Исходный код программы
В программе мы будем использовать функцию чтения значения с цифрового контакта Arduino чтобы считать значение с выхода модуля инфракрасного датчика. На основе этого считанного значения мы затем будем осуществлять расчет числа оборотов в минуту.
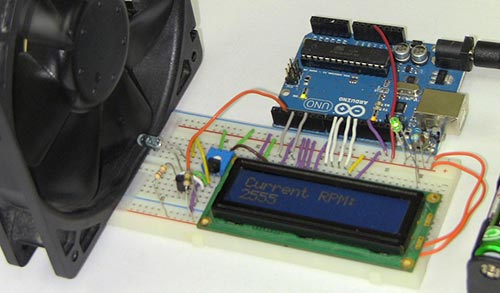
Тахометр на Arduino
В этой статье мы рассмотрим, как использовать ИК-передатчик и приемник для изготовления тахометра с применением Arduino. Результат отображается на ЖК-дисплее 16х2.
Целью данного проекта является создание системы с одним входом и одним выходом. На входе устройства присутствует сигнал, изменяющийся с высокого (+5В) на низкий (+0В) уровень при нарушении связи. Согласно этому сигналу, Arduino будет увеличивать значение внутреннего счетчика. Потом проводится дополнительная обработка и расчет, и по прерыванию триггера на ЖК-дисплей будет выводиться рассчитанное RPM.
Для связи мы будем использовать ИК-луч от ИК-светодиода, включенного через низкоомный резистор так, чтобы светиться ярко. В качестве приёмника мы будем использовать фототранзистор, который при отсутствии света ИК-светодиода «закрывается». Компьютерный вентилятор будет размешен между ИК-передатчиком и приёмником и включен. ИК-приёмник включенный через транзисторную схему, будет генерировать прерывания. Для вывода результата будет использоваться Arduino LCD интерфейс, поэтому мы можем вывести окончательное значение RPM на ЖК-дисплей.
Элементы:
Arduino UNO
16×2 LCD
Макетная плата
Подстроечный резистор 5 кОм
Перемычки
SIP разъёмы
2x 2N2222 NPN транзистор
Инфракрасный светодиод
Фототранзистор
Резистор 10 Ом
Резистор 100 кОм
Резистор 15 кОм или 16 кОм
Компьютерный вентилятор
Подробный список элементов
Все элементы используемые в проекте указаны выше, но я более подробно опишу функции основных элементов.
Arduino UNO
Это плата Arduino, которую мы будем использовать для обработки импульсов от прерывания ИК-луча, которые сообщают о нахождении лопасти компьютерного вентилятора между приемником и датчиком. Arduino будет использовать эти импульсы наряду с таймером, чтобы вычислить RPM вентилятора.
ЖК-дисплей 16×2
После того, как Arduino вычислило RPM, эта значение будет отображаться на дисплее в понятном для пользователя виде.
Подстроечный резистор 5 кОм
Этот подстроечный резистор будет использоваться для регулировки контрастности ЖК-дисплея 16×2. Он дает аналоговое напряжение в диапазоне от 0 до +5В, позволяя настроить яркость ЖК-дисплея.
Инфракрасный светодиод и Фототранзистор
Фототранзистор открывается, когда мощный ИК-свет падает на него. Поэтому, когда ИК-светодиод горит, он держит фототранзистор открытым, но если ИК-светодиод закрывается например, лопастью вентилятора, то фототранзистор закрывается.
2N3904 и 2N3906
Эти транзисторы используются для преобразования уровня сигнала, с целью обеспечения выходных импульсов с фототранзистора для Arduino, в которых нет никаких напряжений кроме +0 и +5В.
Принципиальная схема
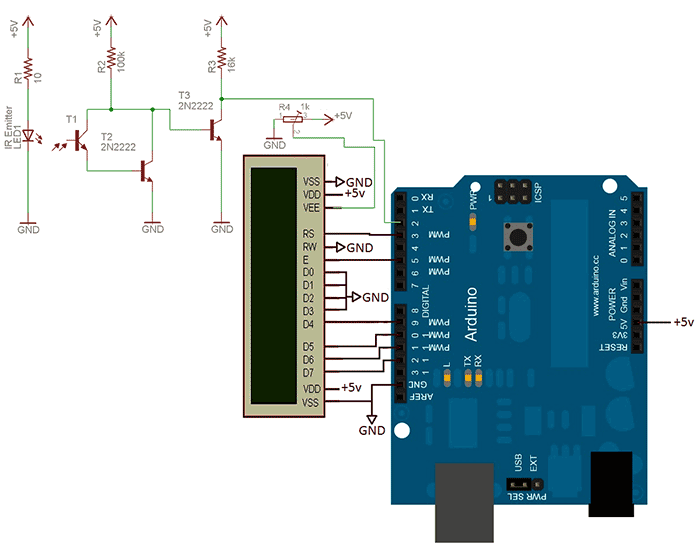
В схеме, интерфейс связи с ЖК-дисплеем упрощен и имеет только 2 линии управления и 4 линии передачи данных.
Особенности схемы
Интерфейс ЖК-дисплея 16×2
2 управляющих контакта и 4 для передачи данных подключены от Arduino к ЖК-дисплею. Это то, что указывает ЖК-дисплею, что и когда делать.
Схема обрыва ИК-луча
Сигнал обрыва ИК-луча идет на 2-ой цифровой контакт Arduino. Это прерывает Arduino, что позволяет ему засчитать импульс и позволяет тахометру получать данные.
Arduino LCD библиотека
Для этого проекта мы будем использовать Arduino LCD библиотеку. В основном мы будем просто обновлять значение RPM на второй строке на новое.
В качестве подготовки, посмотрите на код приведенный ниже, в котором при помощи этой библиотеки на ЖК-дисплей выводиться «Hello, World!» В тахометре мы будем использовать похожий код, особенно: «lcd.print(millis()/1000);».
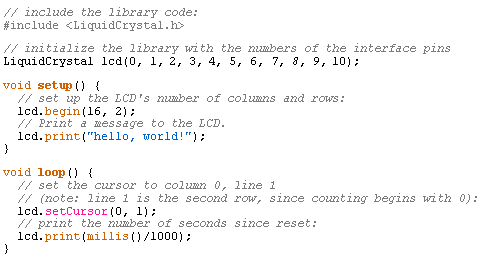
Разберитесь в функциях этой ЖК-библиотеки как можно подробнее, прежде чем двигаться дальше. Она не слишком сложна и хорошо документирована на сайте Arduino.
Подсчет RPM при помощи Arduino
Так как мы собираемся подсчитать RPM компьютерного вентилятора, мы должны понимать, что для подсчета мы используем прерывание ИК-луча. Это очень удобно, но мы должны учитывать, что у компьютерного вентилятора 7 лопастей. Это значит, 7 прерываний равно 1 обороту.
Если мы будем отслеживать прерывания, мы должны знать, что каждое седьмое прерывание означает, что только что произошел 1 полный оборот. Если мы отследим время, необходимое для полного оборота, то мы легко вычислим RPM.
Время 1-го оборота = P * (µS/оборот)
RPM = кол-во оборотов/мин = 60 000 000 * (µS/мин) * (1/P) = (60 000 000 / P) * (кол-во оборотов/мин)
Для расчета RPM мы будем использовать формулу приведенную выше. Формула точная, и точность зависит от того, насколько хорошо Arduino сможет отслеживать время между прерываниями и посчитывать количество полных оборотов.
Сборка схемы
На фотографии ниже вы можете увидеть все необходимые детали и перемычки как на схеме.
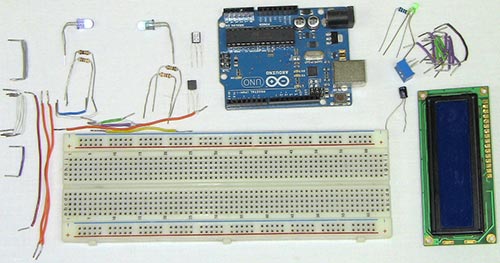
Для начала подключается +5В и линии данных/управления ЖК-дисплея. Затем ЖК-дисплей, потенциометр контрастности и светодиод питания.
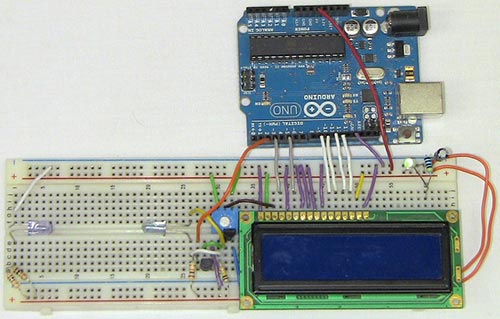
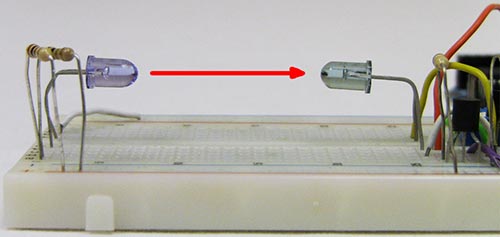
Схема обрыва ИК-луча собрана. Старайтесь, чтобы между ИК-светодиодом и фототранзистором было расстояние. На этой фотографии видно расстояние между ИК-светодиодом и фототранзистором, где я размещу компьютерный вентилятор.
Хватит разговоров о аппаратной части! Давайте начнем делать прошивку/программу, чтобы увидеть работу устройства!
Программная часть
Есть две основных части кода, которые показаны и подробно описаны ниже:
-Основной цикл обновления ЖК-дисплея
-Обновление времени прерываний
В основном цикле считаются обороты и обновления ЖК-дисплея. Поскольку основной цикл это гигантский while(1) цикл, то он будет работать всегда, RPM считаться, а ЖК-дисплей обновляться несколько раз в секунду. Функция в прерывании подсчитывает время между прерываниями ИК, поэтому считать RPM можно в основном цикле.
Помните, что компьютерный вентилятор имеет 7 лопастей, так что это тахометр предназначен для работы только с такими вентиляторами. Если ваш вентилятор или другое устройство дает только 4 импульса за оборот, измените в коде «(time*4)».
Обзор тахометра на Arduino
Вентилятор генерирует импульсы прерывания, а на выходе мы видим RPM. Хотя точность не 100%, а примерно 95%, при стоимости элементов 10$ есть смысл построить этот тахометр на Arduino.
Что теперь делать?
Системы на основе обрыва луча полезны не только при измерении RPM, но и в качестве других датчиков. Например, вы хотите знать, открыта дверь или закрыта. Возможно, вы хотите знать, не проходило-ли что то под роботом. Есть много применений обрыва луча, а схема используемая тут настолько проста, что есть много путей для улучшения и сборки других удивительных устройств.
Заключение
В целом, я считаю этот проект успешным. Но дело во времени и опыте.. Так или иначе, система работает как задумывалось и достаточно надежно, а мы получили ожидаемый результат. Надеюсь, вам понравилось прочитать эту статью и узнать как сделать свой собственный тахометр на Arduino!
Тахометр или спидометр: Поток мыслей про измерение частоты в Arduino
Предистория
Если дома есть Arduino, в гараже машина или мотоцикл, а то и хоть мотособака, в голове туманные представления о программировании — возникает желание измерить скорость движения или обороты двигателя, посчитать пробег и моточасы.
В данной статье я хочу поделиться своим опытом по изготовлению подобных поделок.

Немного физики
Для измерения частоты вращения нам понадобится датчик положения колеса/вала/круга/итп. Датчик ставится как правило один. Возможно, что он будет срабатывать не один раз на каждый оборот. Например, у вас датчик Холла и 4 магнита на колесе. Таким образом, для правильного вычисления частоты нужно знать:
То есть, если частота меньше разумного минимума, то считаем, что она равна нулю, если больше максимума — игнорируем показания.
С количеством срабатываний понятно, но зачем ещё эти мины и максы? Давайте рассмотрим сначала варианты расчёта частоты.
Со скоростью всё проще, достаточно знать число π, диаметр колеса, а частоту вращения мы уже знаем.
Болванка для кода
Так как мы имеем дело с такими нежными величинами как время и пространство, то лучше сразу освоить прерывания.
Обратите внимание на модификатор volatile у переменной counter. Все переменные, которые будут изменяться в обработчике прерывания (ISR) должны быть volatile. Это слово говорит компилятору, что переменная может изменяться неожиданно и доступ к ней нельзя оптимизировать.
Функция ISR() вызывается каждый раз, когда появляется единица на ноге fqPin. Мы эту функцию не вызываем, это делает сам контроллер. Он это делает, даже когда основная программа стоит в ступоре на функции delay(). Считайте, что ISR() обслуживает событие, от вас не зависящее и данное вам свыше как setup() и loop(). Контроллер прерывает выполнение вашей программы, выполняет ISR() и возвращается обратно в ту же точку, где прерывал.
Обратите внимание, что в функции loop() мы отключаем прерывания вообще любые для того, чтобы прочитать переменную counter и сохранить её во временную переменную cnt. Потом, конечно же, включаем снова. Так мы можем потерять один вызов, конечно же, но с другой стороны, переменная unsigned long имеет 32 бита, а процессор ATMega32 8-битный, вряд ли он скопирует данные за один такт, а ведь в процессе копирования может случиться прерывание и часть данных изменится. По этой же причине мы копируем значение counter локально так как значение этой переменной при использовании в разных местах программы может быть разным опять же из-за изменения её в прерывании.
Тело функции ISR() должно быть максимально коротким, точнее, сама функция должна выполняться максимально быстро. Это важно, так как прерывается выполнение вашего кода, который может оказаться чувствительным к непредвиденным задержкам. Некоторые библиотеки отключают прерывания для выполнения чувствительных с задержкам операций, например для управления светодиодной лентой WS2812.
Считаем обороты за единицу времени.
Первое, что приходит в голову, это взять интервал времени и посчитать количество измерений.
Как и у многих простых решений, у этого есть неочевидные минусы. Для повышения точности измерений вам необходим довольно большой интервал времени. Принцип тот же, что и у Шума квантования. При времени оборота колеса сравнимом с временем подсчёта, существенные изменения скорости вращения не будут замечены. Показания такого частотомера будут различаться до двух раз на каждый отсчёт.
Для повышени точности на малой скорости можно увеличить число К, как это сделано, скажем, в автомобильной технике для датчика ABS. Можно увеличить время подсчёта. Делая и то и другое мы подходим ко второй проблеме — переполнению счётчика. Да, переполнение легко лечится увеличением количества бит, но арифметика процессора Arduino не умеет считать 64-битные числа столь быстро, как хотелось бы и как она это делает с 16-разрядными.
Увеличение времени расчёта тоже не очень хорошо тк нам надо знать частоту прямо сейчас, вот при нажатии на газ, а не через пару секунд. Да и через пару секунд мы получим скорее некое среднее значение. За это время можно несколько раз сделать врумм-врумм.
Есть другой метод. Он лишён вышеописанных недостатков, но, как водится, имеет свои.
Считаем интервал между отсчётами
Мы можем засечь время одного отсчёта и другого, вычислить разницу. Величина, обратная вычисленному интервалу и есть частота. Круто! Но есть минусы.
Что делать, если наше колесо крутится еле-еле и измеренный интервал превышает разумные пределы? Выше я предложил считать частоты ниже разумного минимума за ноль.
Определённым недостатком метода можно считать шумы квантования на высоких частотах, когда целочисленный интервал снижается до нескольких двоичных разрядов.
Так же хотелось бы некую статистику подсчётов для улучшения показаний, а мы берём лишь последнее значение.
Методом проб и ошибок я подобрал интервал отображения данных на дисплее в 250мс как оптимальный. Если чаще, то цифры размазываются, если реже — бесит тормознутость.
Комбинированный метод
Можно попробовать объединить достоинства обоих методов.
То есть, мы засекаем время не просто между отсчётами, а время между проверками данных и делим на количество отсчётов за это время. Получается усреднённый интервал между отсчётами, обратная величина от которого есть частота. Предоставим компилятору оптимизировать вычисления.
Обратите внимание, что за интервал считается не время опроса, как в первом примере, а время от последнего отсчёта до предыдущего последнего отсчёта в прошлом опросе. Это заметно поднимает точность вычисления.
Таким образом, мы можем получать вполне достоверные данные как на низких так и на высоких частотах.
Если использовать кооперативную многозадачнось, то можно сделать подсчёт, скажем раз 100мс, а вывод на дисплей раз в 250мс. Очень короткий интервал опроса снизит чувствительность к низким частотам.
Как говорят в рекламе, «но это ещё не всё».
Ошибки дребезга
Для устрашения вас предположу, что измеряем частоту вращения двигателя от индуктивного датчика зажигания. То есть, грубо говоря, на высоковольтный провод намотан кусок кабеля и мы измеряем индукцию в нём. Это довольно распространённый метод, не правда ли? Что же здесь сложного может быть? Самая главная проблема — современные системы зажигания, они дают не один импульс, а сразу пачку.
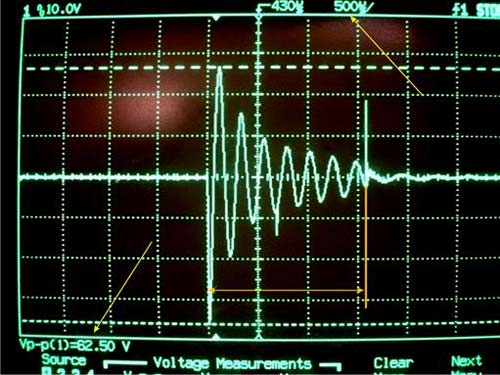
Но даже обычная система зажигания даёт переходные процессы:
Старинные же кулачковые контактные вообще показывают замечательные картинки.
Как с этим бороться? Частота вращения не может вырасти мгновенно, не даст инерция. Кроме того, в начале статьи я предложил ограничить частоту сверху разумными рамками. Отсчёты, что происходят слишком часто можно просто игнорировать.
Другой вид помех — это пропадание отсчётов. Из-за той же инерции у вас не может измениться частота в два раза за одну миллисекунду. Понятно, что это зависит от того, что вы собственно измеряете. Частота биения крыльев комара может, вероятно и за миллисекунду упасть до нуля.
Статистическая обработка в данном случае становится уже достаточно сложной для маленькой функции обработки прерывания и я готов обсудить варианты в комментариях.
Особенности измерения скорости движения и скорости вращения.
При измерении скорости вращения бензинового двигателя надо обязательно учесть величину К, которая совсем не очевидна. Например, вы намотали провод на кабель свечи и ожидаете, что там будет одна искра на один оборот. Это совсем не так. Во-первых, у 4-тактного двигателя вспышка происходит один раз на два оборота, у 2-тактного один раз на оборот коленвала. Во-вторых, для упрощения системы зажигания коммутатор подаёт искру на неработающие в данный момент цилиндры, типа на выпуске. Для получения правильного К надо почитать документацию на двигатель или подсмотреть показания эталонного тахометра.
При измерении скорости движения частота обновления дисплея не имеет большого значения, особенно, если вы рисуете цифры, а не двигаете стрелку. Даже обновление информации раз в секунду не вызовет отторжения. С оборотами двигателя всё наоборот, индикатор должен откликаться гораздо быстрее на изменение оборотов.
Вывод информации
Типичная обида начинающего разработчика автомобильной и мотоциклетной электроники «стрелки дёргаются, цифры нечитабельны» лечится простым способом — надо обманывать клиента. Вы что думаете, автомобильный тахометр всегда показывает вам правду? Конечно же нет! Хотя вам этот обман нравится и вы хотите, чтобы ваш прибор дурил голову так же.
Стрелки
Если включить зажигание на новом модном автомобиле или мотоцикле, стрелки приборов сделают красивый вжух до максимума и медленнее опадут до нуля. Вот! Вот это нам и надо сделать. Надо, чтобы при показе максимальной величины стрелка не метнулась к ней мгновенно и не упала как акции лохотрона в ноль.
Итак, нам надо учитывать максимальную скорость стрелки на увеличение и максимальную на уменьшение показаний. Совсем хорошо сделать эти скорости нелинейными, чтобы стрелка сначала двигалась быстрее, а потом чуть помедленнее приближалась к заданному значению.
Вот пример с нелинейным выводом показаний:
Вы можете поиграть с коэффициентами. Этот же принцип используется при выводе громкости сигнала, например, у любого аналогового индикатора: стрелки, полоски, яркость, цвет, размер итп. Приведённый пример самый простой, но и не самый красивый. Предлагайте ваши варианты в комментариях.
Цифры
С цифрами всё намного сложнее. Быстрые изменения показаний приводят к тому, что несколько порядков сливаются в мутное пятно. Для скорости, как и писал выше, можно задать интервал раз в секунду и глаз успеет прочитать три цифры.
В мототехнике не зря делают аналоговые индикаторы оборотов, точные цифры не нужны, важна относительная близость к оборотам максимального крутящего момента, к максимальным вообще и холостые.
Я предлагаю менять частоту вывода информации на дисплей в зависимости от степени изменения величины. Если обороты меняются, скажем, на 5% от последнего подсчёта, а не показа — можно затупить и показывать раз в 300-500мс. Если на 20%, то показывать раз в 100мс.
Можно огрубить шкалу и показывать только две значащие цифры
С учётом мототематики, можно довольно точно показывать обороты холостого хода как описано чуть выше и огрублять вывод на оборотах от двух холостых. На высоких оборотах для гонщиков важнее делать блинкеры типа «передачу вниз», «передачу вверх» и «ты спалишь движок». То есть держать двигатель около максимального крутящего момента и не дать ему крутиться выше максимальных разрешённых оборотов. Блинкеры замечательно делаются с помощью SmartDelay когда можно унаследовать от этого класса свой с заданной ногой контроллера и частотой мигания, там есть методы для переопределения и они вызываются раз в заданное время.
Идеи по отображению цифр тоже приветствуются в комментариях.
Вывод
Если наступить на все грабли, можно стать опытным разработчиком.