Дело техники. Кто и зачем возрождает полноуправляемое шасси, которое успели «похоронить»
Стоимость может похоронить любое благое начинание. В автомобилестроении факт, когда цена вопроса перевешивала многочисленные достоинства той или иной конструкции, подтверждался неоднократно. Тем не менее перспективы, открывающиеся в случае внедрения многообещающей разработки, раз за разом подталкивали инженеров не останавливаться и искать выход из тупикового положения.

История автомобилей с полным управлением как нельзя лучше подтверждает сказанное. Транспортные средства, где управлением заведуют не только передние, но и задние колеса, давно не новость. И хотя известны они не меньше 100 лет, встречались подобные конструкции редко и в основном на военной и специальной технике, при производстве которой стоимость не имеет решающего значения.

Однако о применении полного управления в серийных легковых моделях всерьез заговорили лишь после подведения итогов европейского конкурса на звание «Лучший автомобиль 1988 года». Третье и четвертое места в нем заняли Honda Prelude и Mazda 626, а на итоговое положение этих моделей повлияло использование в их конструкции передовых технических решений, в первую очередь системы полного управления, в которой поворачивающимися были все четыре колеса автомобилей.

Выгоды от применения полного управления заключались в изменении радиуса поворота автомобиля. Поворачивая, любое транспортное средство движется по кривой, мгновенный центр которой находится в месте пересечения перпендикуляров к направлению движения всех его колес. Если бы при маневрировании на небольшой скорости в стесненных условиях задние колеса поворачивались в направлении, противоположном повороту передних колес, радиус поворота стал бы меньше, что улучшило бы возможности для маневров.

Уменьшилась бы и ширина коридора движения, образуемого по причине того, что при движении вперед и маневрировании неуправляемые задние колеса не следуют по траектории передних колес, а срезают ее по кратчайшему пути, что вызывает увод кузова в сторону поворота. Маневрирование в пространстве, ограниченном препятствиями справа и/или слева в зависимости от того, в какую сторону поворачивает автомобиль, требует аккуратности, ибо грозит повреждениями кузова и препятствий.

На модификации Honda Prelude образца 1997 года, укомплектованной третьим после наделавшего шума на конкурсе «Лучший автомобиль 1988 года» поколением системы 4WS (4 Wheel Steering), радиус поворота составлял 4,7 м, тогда как у обычной версии этого автомобиля он был 5,5 м. А на Mazda Xedos 9 тех же лет система 4WS позволяла ехать по кругу на пятачке диаметром 10,5 м, в то время как такому же автомобилю с одними передними управляемыми колесами на подобный маневр требовалась площадка диаметром 12,2 м.

И это еще не все. Если при скоростном движении в вираже одновременно с поворотом передних колес в ту же сторону довернуть и задние колеса, радиус поворота автомобиля увеличится. При этом уменьшатся боковые силы, стремящиеся увести автомобиль с траектории, вызвать его занос и даже опрокидывание, ведь центробежная сила обратно пропорциональна радиусу поворота.

В свою очередь центробежная сила прямо пропорциональна квадрату скорости. Это означает, что система 4WS позволяет машине, сохраняя устойчивость и направление движения, безопасно миновать поворот либо объехать препятствие, внезапно появившееся на пути следования, на более высокой скорости, чем потребовалось бы для выполнения таких же маневров автомобилю, имеющему только передние направляющие колеса.

В частности, в то время как обычная Mazda Xedos 9 проезжала тестовую «змейку» с пилонами, установленными в 10 метрах друг от друга, со скоростью 101 км/ч, Xedos 9 4WS справлялся с этим же упражнением, развивая 126 км/ч.

Как видим, преимущества системы 4WS ощутимы, но теперь необходимо вспомнить про то, сколько за них требовалось заплатить. 20 лет назад вклад 4WS в общую стоимость автомобиля оценивался примерно в 5000 долларов.
Это объясняет, почему автомобили с передними и задними управляемыми колесами не получили широкого распространения и пользовались ограниченным спросом. Впереди планеты всей оказалась Япония, фактически лишь на ее внутреннем рынке находились отдельные желающие выложить указанную немалую сумму взамен решения проблем с маневрированием и парковкой в перенасыщенных транспортом городах и при движении по горным дорогам, изобилующим быстрыми поворотами. Кроме Daihatsu, Isuzu и Suzuki, все другие японские марки имели в производственных программах полноуправляемые модификации некоторых своих моделей.

В 2001 году к процессу подключились американцы.

В General Motors пришли к выводу, что система 4WS, улучшая маневренность автомобиля в ограниченном пространстве, должна прийтись ко двору многочисленным владельцам столь любимых в Новом Свете громоздких и неповоротливых внедорожников и пикапов, особенно тем из них, кто регулярно использовал машину для буксировки прицепов.


Увы, все старания, начиная с рекламной кампании под лозунгом «Пора по-другому взглянуть на маневренность джипов и пикапов», предварявшей рыночный дебют GMC Yukon и Sierra, Chevrolet Silverado и Suburban с системой полного управления, получившей название Quadrasteer, а затем последовательного снижения стоимости этой опции с 5500 до 2000 долларов, пошли прахом.

Через три года после начала продаж General Motors, убедившись, что даже последняя цена не подстегнула спрос на модификации со всеми поворачивающими колесами, объявила, что отказывается от производства Quadrasteer себе в убыток.

Однако достоинства полного управления при нем и остались. Поэтому продолжаются и попытки внедрения 4WS на легковых автомобилях. Очередную попытку вдохнуть в полное управление жизнь предприняла компания Audi, которая, поэкспериментировав с 4WS в 1970-х, тогда дальше изготовления опытных образцов пойти не рискнула.

В результате Audi Q7, представленная в 2015 году, стала первой серийной моделью марки, для которой под заказ предлагается полное управление. И хотя называется эта опция управляемой задней подвеской, речь идет об одновременном согласованном повороте колес передней и задней осей в одну и ту же сторону либо в разные стороны в зависимости от скорости автомобиля и дорожной ситуации. В частности, для улучшения маневренности и уменьшения ширины коридора движения передние и задние колеса в разные стороны поворачиваются только при скорости ниже 60 км/ч. При движении с более высокими скоростями все колеса поворачиваются в одну сторону.

Задняя подвеска Q7 состоит из пяти рычагов на каждое колесо. Поворот заднего колеса осуществляется благодаря перемещению одного из этих рычагов в ту или иную сторону. При обычном исполнении подвески этот рычаг закреплен между подрамником и ступицей колеса.

В варианте управляемой подвески, рычаг становится активным и превращается в направляющую тягу, которая крепится не к подрамнику, а к установленному на подрамнике заднему рулевому механизму с электроприводом. Но поворотные кулаки, как для передних колес, не предусмотрены. Угол поворота задних колес не превышает 5 градусов, поэтому изменение углов поворота обеспечивается за счет эластичности сайлент-блоков в соединениях рычагов подвески с подрамником, а в поворотных кулаках нет необходимости.


Электродвигатель трехфазный бесщеточный синхронный. Ток для него создается выходным силовым каскадом. Электромотор через ременную передачу вращает гайку ходового винта рулевого механизма. Вращение гайки преобразуется в прямолинейное перемещение ходового винта и закрепленных на нем направляющих тяг. В какую сторону под воздействием направляющих тяг повернутся колеса, зависит от направления вращения электродвигателя. Максимальный ход винта из среднего положения составляет 9 мм, что соответствует наибольшему углу поворота задних колес примерно на 5 градусов.
Так это работает, но сколько такое удовольствие может стоить? Судя по прайс-листам, стать владельцем Q7 со всеми поворачивающимися колесами можно за сумму, эквивалентную примерно 1400 долларам. Однако помимо снижения стоимости системы Audi по сравнению с тем, что выпускалось ранее, любопытен еще и выбор модели.
Полноуправляемое шасси, или когда все колеса автомобиля поворачивают
Существует несколько способов сделать автомобиль маневренным: дать ему микроскопическую колесную базу, как у оригинального Austin Mini, устроить «дрифтовый» выворот колес… А можно просто сделать так, чтобы поворачивали все четыре колеса.
Вы, не поверите, но технологии полноуправляемого шасси уже около ста лет, и мы проследим весь ее путь. Тем более, что сейчас к ней прибегают многие автокомпании – все больше новых моделей кроссоверов или спорткаров умеют подруливать в поворотах, чтобы быть еще стабильнее, маневреннее и быстрее.

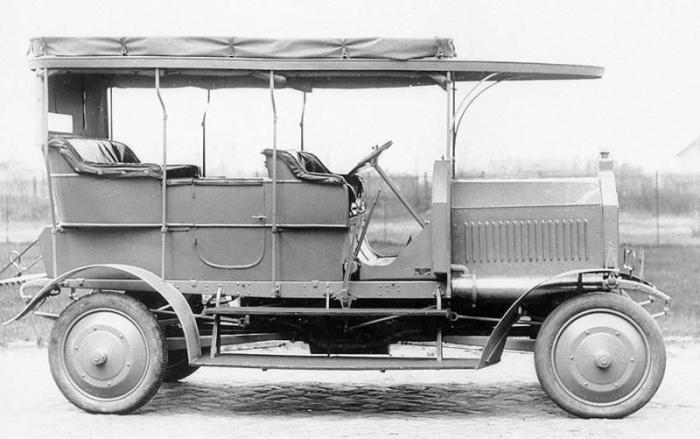
Ошибки нет – четырехколесному управлению действительно около ста лет. 111, если быть точным. Впервые автомобиль, у которого поворачивали все четыре колеса, появился… внезапно, в Австралии. Тогда, в 1907 году, братья Феликс и Норман Лори Кэлдуэллы, а также их партнер Генри Вейл, основали компанию Caldwell Vale Truck & Bus Co. В том же году Кэлдуэллы зарегистрировали на свое имя патент, относящийся к разделу «внутренние улучшения соединительных/подвижных механизмов в транспортных средствах», основанные на построенном прототипе. Патентные изображения не сохранились, но технически это была полноприводная трансмиссия с четырьмя управляемыми колесами.

Чуть позже, в 1910 году, Генри Вейл предложил внести ряд конструкционных изменений в прототип, которые вылились в новый патент – «улучшенное рулевое управление с усилителем для тяжелых сельскохозяйственных машин и автомобилей». Это было то же полноуправляемое шасси, но с примитивной версией гидроусилителя. И вот после этого патента выпуск техники от Caldwell Vale встал на поток. Ну, как встал – производство машин продолжалось до 1916 года, пока Caldwell Vale Truck & Bus Co. не выкупила фирма Purcell Engineering.

За это время три инженера построили около 40 машин, среди которых были полноприводные легковушки, грузовики и… тракторы с полноуправляемым шасси. Австралийские изобретатели посчитали, что меньший радиус разворота тракторов поспособствует более быстрым проходам по полям – в чем был резон, так как современные тракторы тоже частенько рулят всеми четырьмя. Но в те годы технология оказалась слишком сложной и новаторской, поэтому особо не прижилась. До наших дней дожила всего одна машина Caldwell Vale Truck & Bus Co. – грузовик 1910 года.

Однако австралийское происхождение двух управляемых осей до сих пор оспаривают немцы. Ведь в то же время, в 1907 году, немецкая компания Mercedes построила для Бернхарда Дернбурга так называемый Dernburg-Wagen – полноприводный автомобиль, на котором министр колоний Германии передвигался по Намибии. Созданный в единственном экземпляре, Dernburg-Wagen стал одним из первых легковых полноприводников в мире и был одной из самых высокотехнологичных машин своего времени. Поль Даймлер, стоявший за его разработкой, гордился своим детищем.
Хотя на гражданских автомобилях полноуправляемое шасси сто лет назад толком не встречалось, на полке технологий оно не лежало – его использовали на тракторах. На легковые автомобили же тенденция слегка распространилась накануне Второй мировой войны. И снова благодаря немцам: внедорожник Mercedes-Benz W152, представленный на Лондонском автосалоне в октябре 1938 года, получил уже знакомые Мерседесу подруливающие в противоположном направлении колеса задней оси. Машина была разработана для полицейских, охотников и правительственных чиновников в африканских колониях. Задние колеса полноприводного внедорожника подруливали на скорости до 30 километров в час, что помогало ему эффективнее бороться с колеей на бездорожье. Инженеры конкурирующих компаний призадумались…

И уже в ходе Второй мировой почти все крупные автомобильные компании создавали машины с четырьмя поворачивающими колесами – хотя бы на уровне прототипов. Даже BMW (на фото как раз баварский внедорожник BMW 325, созданный под категорию 3 – или же Kfz.3). Однако четыре поворачивающих колеса потерпели фиаско – простые аналоги с одной парой рулевых колес (например, Willys MB) были дешевле в изготовлении, меньше ломались, а по своим характеристикам и свойствам не сильно уступали более «рулящим» собратьям. Поэтому полноуправляемые внедорожники либо оставались прототипами, либо выпускались тиражом в несколько сотен, максимум – пару тысяч экземпляров.

После войны технология поворачивания не только передними колесами плотно вошла в армейскую среду – хотя бы по той причине, что ряд стран обзавелся устрашающими шайтан-машинами, которым требовалась дополнительная маневренность ввиду габаритного и опасного груза на борту. Что касается легковых машин, то они примерно лет на 40 забыли про полноуправляемое шасси – за редкими прототипными исключениями, вроде Audi 100. В дополнительной рулевой оси тогда просто не было смысла: в США громоздкие седаны и купе ездили по хайвэям, где нет резких виражей, а Европа и Азия заведомо делали выбор в пользу миниатюрных машин, как то Austin Mini/Fiat 500 или кей-кары. Да, у сочлененных автобусов и троллейбусов встречались поворотные задние оси – но это совсем другая история.

Так сошлись звезды, что в 80-е про эту технологию вспомнили везде. В США – по причине роста популярности шоу монстр-траков, которым нужно было быстро разворачиваться на ограниченном пространстве стадионов. В Европе – из-за автоспорта, в котором машины становились невероятно быстрыми и требовали дополнительной маневренности. Ну а в Азии – для той же маневренности и «вау-эффекта» на экспортных моделях. А как иначе покорить Запад?

Не секрет, что первым по-настоящему массовым автомобилем с полноуправляемым шасси стала Honda Prelude третьего поколения. Да, для купе это была опция (причем дорогостоящая по меркам того времени – 1500 долларов), но именно она совершила мини-революцию на рынке. С 1987 по 1991 год система 4WS была полностью механической – вал, передающий угол поворота руля, соединялся с планетарной передачей на задней оси, которая регулировала поворот задних колес. Причем в зависимости от угла поворота, задние колеса поворачивали либо в ту же сторону, что и передние, либо в противофазу с ними. Но с 1992 года 4WS стала компьютеризированной, обзаведясь микрокомпьютером с сенсорами.

В 1988 году технология стала появляться у других автомобильных брендов: Mazda внедрила полноуправляемое шасси на модели MX6 и 626, Toyota – на модель Camry… Ну а спортивное подразделение Peugeot снабдило подруливающей задней осью легендарный Peugeot 405 Turbo 16, на котором Ари Ватанен в 1988 году установил рекорд по подъему на Пайкс-Пик – 10 минут, 47 секунд и 77 сотых. Знаменитый заезд был показан в короткометражном фильме, известном как «Climb Dance».

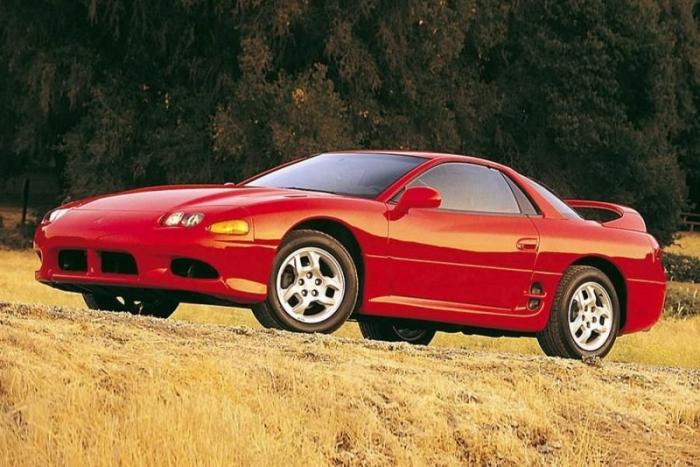
Ближе к 90-м подруливающая задняя ось была у десятков автомобилей японского происхождения. В основном – у машин с намеком на спорт или откровенной претензией на него. Вспомнить хотя бы спортивные версии Mitsubishi Galant того времени, гран-туризмо 3000 GT или же Ниссаны 300ZX, 240SX и Skyline с системой High Capacity Actively Controlled Steering (HICAS). Не чурались технологии и немцы – BMW 850CSi с системой Active Rear Axle Kinematics (ARAX) тому доказательство.
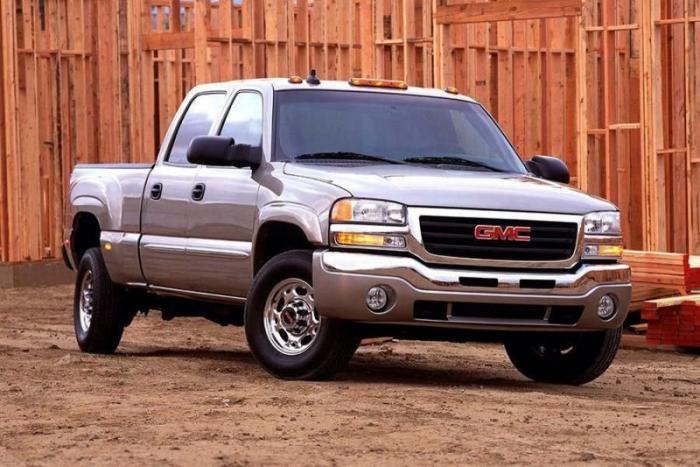
Если не считать Dodge Stealth, который был копией Mitsubishi 3000GT, в США технология полноуправляемого шасси была популярна только на автобусах и тракторах. Однако в начале 2000-х General Motors предложил для покупателей Chevrolet Silverado и Suburban (а также их братьев-близнецов GMC Sierra и Yukon XL) технологию Quadrasteer, созданную Delphi Corporation. Рулевое управление всех четырех колес позволяло легче парковать массивные внедорожники и пикапы, а также упрощать маневрирование при буксировке прицепов – например, с лодками. Хотя опция была полезной, а сама технология – надежной, с 2002 по 2004 год было продано лишь 16 500 машин с Quadrasteer. Клиентов отпугнула цена опции, которая на старте продаж оценивалась в 5600 долларов.
Тем не менее, начиная с 2000-х полноуправляемым шасси оснащаются чуть ли не все премиальные автомобили. Хотя бы опционально. Его можно встретить почти на всей современной линейке BMW и Porsche. Nissan продолжает по сей день совершенствовать HICAS, который вы можете найти на большинстве нынешних моделей Infiniti. Подруливают «бедрами» и Ferrari F12tdf или GTC4Lusso. Угол подруливания задних колес, как и направление подруливания, в наши дни задают компьютеры, и эта технология позволяет сделать спорт- и суперкары чудовищно маневренными в поворотах. Кто знал, что тракторное ноу-хау так пригодится в высшем эшелоне…
Полноуправляемое шасси: с чего начиналась технология и к чему в итоге пришла
О полноуправляемых шасси для легковых автомобилей, то есть тех, где поворачиваются все четыре колеса, уже успели подзабыть. Недолгий расцвет технологии в начале 1990-х годов быстро сошел на нет с развитием многорычажных подвесок. Но в последние годы у производителей снова наблюдается рост интереса к этой любопытной конструкции. С чем это связано и каковы перспективы этой технологии сейчас?
На самом деле функция поворота всех колес, попавшая в автопром из сельскохозяйственной и грузовой индустрии, на легковых автомобилях серийно появилась еще в 1987 году на одной из моделей Honda.
Надо сказать, что чего-то принципиально сложного и нового в технологии, которая была придумана еще на заре XX века, не было. На тракторах, грузовиках и внедорожниках конструкция использовалась исключительно для повышения маневренности, уменьшения радиуса поворота и проходимости (в повороте у таких авто задние колеса движутся по колее передних, что снижает сопротивление).
Однако Honda нашла этой технологии новое и весьма неожиданное применение. Чтобы разобраться, как это работает, нужно немного углубиться в теорию и понять, как машина поворачивает.


Как это работает в теории?
При повороте передних колес вся геометрия шасси меняется. Даже при повороте на месте из-за наличия угла кастера и плеча обкатки сдвигается центр масс автомобиля, изменяется угол продольного и поперечного крена. Меняется и положение задних колес относительно оси движения, даже неразрезная балка немного изменит углы установки. В динамике все будет еще сложнее: добавится крен от воздействия центробежных сил на центр масс машины, уводы резины и тому подобные факторы.
Мгновенный центр поворота, радиусы поворота передней и задней оси соотносятся заметно сложнее, чем в известном правиле Аккермана. Но именно по этой условной схеме проще всего понять, как будет поворачивать машина.

На идеально упрощенном шасси у всех колес есть единый центр поворота. У неповоротных колес задней оси радиусы поворота накладываются друг на друга и перпендикулярны траектории своего движения. Но при этом в каждый момент времени задние колеса относительно траектории центра масс и геометрического центра автомобиля движутся «наружу» поворота.
И чем короче колесная база, тем больше угол между осью поворота задних колес и центром масс и геометрическим центр машины. И, напротив, чем больше база, тем этот угол меньше. Чем короче база, тем больше уводы задних колес.

Если сделать задние колеса поворачивающимися, то можно достичь нескольких целей. Во-первых, при повороте колес в противоположную по отношению к передним сторону сильно сокращается радиус разворота, а равно и углы увода резины каждого из колес, что важно, например, при движении по слабым грунтам и для сокращения износа покрышек.
Во-вторых, имеет смысл и поворот задних колес в ту же сторону, что и передние. При небольшом угле отклонения с точки зрения геометрии шасси и углов уводов задних колес машина становится «длиннее», а при той же величине перемещения по перпендикуляру относительно траектории сильно возрастает радиус поворота, а значит, уменьшаются центробежные нагрузки и перераспределение массы машины. А это значит, что подвески работают в лучших условиях.

Получается, на малой скорости выгодно отклонять задние колеса в противоположную сторону относительно поворота передних — это улучшает маневренность, а на большой скорости надо поворачивать в ту же сторону — это улучшает устойчивость, управляемость и способность шасси воспринимать боковые нагрузки. Даже несколько градусов отклонения эквивалентны увеличению радиуса поворота на значимую величину. При этом чем компактнее машина, тем более выражен эффект.
Как осуществилось технически?
Идея японцев в конце 1980-х годов была проста: ставим на заднюю ось рейку, от рейки передних колес прокладываем вал, и при малых углах отклонения колеса задней оси поворачиваются в ту же сторону, что и передние, а при больших углах поворотов, соответствующих малой скорости движения, — в противоположную. Очень скоро несовершенство такого примитивного алгоритма стало очевидным, и к 1991 году схему заменили на электронное управление.

Впрочем, с той же рейкой и механико-гидравлическим приводом. Напомню, об электроусилителях высокого качества на массовых авто речи еще не шло, а первая многорычажная подвеска на Mercedes W201 как раз завоевывала мир и уже получила признание — именно с таким типом подвесок разрабатывали флагманские модели «большой немецкой тройки».
Управляемость тогда как раз успела стать трендом. Автожурналисты хвалили машины, которые хорошо рулились и стояли на траектории, но при этом не обладали «железобетонной» подвеской.

Потребители тоже оценили возможности шасси с новым уровнем настройки. Неразрезные мосты и диагональные рычаги в первую очередь стремились заменить у заднеприводных машин. Для переднеприводников неплохие возможности открывались при использовании более простой полузависимой подвески, но чуть упрощенные «многорычажки» для них тоже готовили. К середине 1990-х годов требования к шасси даже для простых легковых автомобилей выросли настолько, что в сравнении с ними спортивные авто 1980-х смотрелись тележками для движения по прямой.
Разумеется, полноуправляемые шасси в том виде, в котором они были разработаны в Японии (интерес проявляли Honda, Infinity, Mitsubishi и Nissan), не могли стать массовыми.

Для европейских производителей актуальность этого технического решения была весьма умеренной. Так, для BMW 850 была создана система Active Rear Axle Kinematics (ARAX), однако волна интереса к сложным конструкциям быстро сошла на нет. В 1994 году произошло другое знаковое событие — компания Bosch предложила первую систему стабилизации ESP. В сочетании с многорычажными подвесками она позволяла достичь лучшей эффективности при заметно меньшей стоимости.
Заинтересовало полноуправляемое шасси и американцев, которые в начале 2000-х попробовали оборудовать этой системой любимые в США большие пикапы для улучшения маневренности. Но и там конструкция оказалась дороговатой.
Возвращение к истокам
Однако идея не отправилась в архив. На волне увлечения мехатронными шасси о ней вспомнили и. приспособили к многорычажной подвеске. Ведь что такое «многорычажка»? Правильно, подвеска, которая сама меняет углы установки колес в зависимости от нагрузки.
Porsche и Ferrari первыми добавили к стандартной «многорычажке» исполнительные механизмы, наделив ее возможностями полноуправляемого шасси. На фоне стоимости этих машин цена доработки не казалась чрезмерной, а потому была оправданна. Пусть углы поворота колес при отсутствии полноценного рулевого управления на задней оси и невелики, но их хватает для заметного улучшения поведения в поворотах.

В дальнейшем, со снижением стоимости мехатронных компонентов, появилась возможность применить идею и на более «дешевых» машинах. Так, сегодня полноуправляемое шасси активно использует компания Audi на старших моделях на платформе MLB-Evo. Там конструкция подразумевает наличие на задней оси дополнительных подвижных тяг, которые управляются электроприводами по сигналу бортового компьютера и меняют угол поворота задних колес в пределах пяти градусов в зависимости от скорости и угла поворота передних. То есть технически управляемая задняя ось работает «по проводам», что заметно упрощает конструкцию.

Использование мехатронных приводов позволяет уменьшить зависимость настроек управляемости от жесткости шасси, в частности от режимов работы пневмоподвески, снизить затраты на доводку управляемости и влияние загрузки машины на процесс руления, а также заметно повысить маневренность.
Однако пока все это оправданно только на автомобилях премиум-класса: подобная доработка шасси не столь критично сказывается на общей стоимости и без того дорогого автомобиля.