Правильный Тюнинг. расчёты.

Заморочившись решил посчитать влияние не подрессоренного веса + инерции колеса…
Наткнулся на очень познавательную статью по физике.
Читать всем кто хочет хоть что-то соображать.
Конечно, нельзя, основываясь на школьном курсе физики, обсчитать и описать все поведение автомобиля в меняющихся дорожных условиях. Но некоторые моменты могут быть рассчитаны довольно точно при минимальных упрощениях и допущениях. Просто большинство автолюбителей не задумывается над этим, а если и понимает описанные процессы на интуитивном уровне, то до расчетов у них как правило дело не доходит.
Эта статья — попытка простым языком описать некоторые моменты физики взаимодействия автомобиля с дорогой. А тех, кому на первый взгляд в начале изложении все показалось знакомым и примитивным, стоит все-таки просмотреть статью до конца: здесь есть некоторые неочевидные выводы или, по крайней мере, интересные цифры и ссылки.
Исходные положения и допущения
Приводимые ниже определения вполне сознательно немного упрощены — их нестрогость не повлияет на точность дальнейших рассуждений, но облегчит понимание процессов и закономерностей. Кроме того, будем считать, что в узлах трансмиссии нет трения — оно невелико по сравнению с действующими в них силами. Эти потери будут оценены отдельно.
Радиус колеса R для простоты везде и всегда будем считать равным внешнему радиусу покрышки, допуская, что деформация колеса в зоне контакта с дорогой невелика. При расчете размеров колеса удобно пользоваться шинным калькулятором. Для штатной резины Нивы (175/80R16) радиус колеса R=0,343 м.
Скорость автомобиля V, ускорение a. Еще нам потребуются угловая скорость вращения колес w=V/R и угловое ускорение e=a/R.
Крутящий момент (момент силы) M равен произведению силы F на плечо. В формулах вращательного движения крутящий момент занимает то же место, что и сила при прямолинейном движении. Для нашего случая данного определения вполне достаточно, причем плечо будет равно радиусу колеса R:
Передаточное отношение i в механике определяется, как отношение угловых скоростей входного и выходного валов передачи. Применительно к автомобилю угловые скорости принято считать в оборотах в минуту n:
Здесь действует так называемое «золотое правило механики»: во сколько раз мы проигрываем в скорости и пути, во столько же раз выигрываем в силе, и соотношение крутящих моментов на валах передачи обратно соотношению скоростей:
При нескольких передачах общее передаточное отношение равно произведению передаточных отношений.
Сила трения возникает как реакция при попытке смещения одного тела относительно поверхности другого сдвигающей силой, приложенной параллельно этой поверхности. Рассмотрим процесс трения последовательно — по мере роста сдвигающей силы.
При небольших значениях сдвигающей силы движению тела препятствует сила трения (реакция поверхности). Она равна приложенной силе, но действует в противоположном направлении. В результате тело остается в покое. По мере роста сдвигающей силы будет расти и сила трения. И это будет продолжаться до тех пор, пока сдвигающая сила не превысит порог Fтр max, после которого тело начнет двигаться. Величину Fтр max определяют через коэффициент трения kт, равный отношению Fтр max к перпендикулярной поверхности прижимающей силе, точнее, равной ей по величине силе реакции N:
Обязательно нужно отметить, что при переходе к скольжению сила трения скачком уменьшается. Это знает каждый автомобилист: тормозной путь с заблокированными колесами больше, чем в случае, когда колеса тормозят, но вращаются со скоростью автомобиля «на пределе». Именно поэтому самый короткий тормозной путь обеспечивает система ABS, контролирующая вращение колес при торможении и не позволяющая им заблокироваться.
Нас будет интересовать только сила трения между колесом и поверхностью дороги. Коэффициент трения сильно зависит от состояния трущихся поверхностей. Для сухого асфальта коэффициент трения доходит до 0,8, а при наличии пленки воды он падает до 0,1…0,2, на обледеневшей поверхности — еще меньше.
Момент инерции J материальной точки массой m, вращающейся по окружности радиусом r, равен:
Ниже нас будет интересовать только момент инерции колеса Jк. Точно рассчитать момент инерции такого сложного по форме тела затруднительно. На основании приближенного расчета, приведенного в Приложении, будем считать, что момент инерции колеса, складывающийся из моментов инерции покрышки (п) и диска (д), определяется формулой:
Второй закон Ньютона определяет зависимость между приложенной к телу силой F, массой тела m и ускорением a:
Для вращательного движения этот закон имеет вид:
Принцип суперпозиции позволяет отдельно рассматривать и рассчитывать составляющие сложного движения. Применительно к настоящей статье будем рассматривать отдельно поступательное движение автомобиля (включая колеса) и вращательное движение колес. Допущением здесь будет то, что мы будем применять принцип суперпозиции в том числе и при ускоренном движении автомобиля.
Расчет скорости и крутящего момента
Передаточные отношения трансмиссии iт для ВАЗ-21213/214 с пятиступенчатой коробкой передач, двухступенчатой раздаткой и редукторами 3,9 (точнее, 43/11) сведены в таблицу:
Передача
в раздатке
Передача в КПП
нормальная
17,216
9,851
6,380
4,691
3,847
16,559
пониженная
30,629
17,526
11,350
8,346
6,844
Чтобы узнать крутящий момент на одном (каждом!) колесе Mк, нужно взять крутящий момент двигателя Mдв, умножить его на значение iт из таблицы и разделить на количество ведущих колес (для Нивы — на четыре).
Скорость автомобиля V [км/час] по оборотам двигателя nдв [об/мин] и радиусу колеса R [м] можно рассчитать по формуле:
Коэффициент 0,377 учитывает все остальные параметры, включая размерность. Подчеркну, что допущение об отсутствии деформации колеса на точность расчета скорости не влияет: здесь все определяет длина окружности колеса, которая рассчитывается по радиусу как 2pR.
Почему машина едет
Парадоксально, но факт: машину «толкает» дорога. Покажем, почему это так.
Двигатель создает крутящий момент Mдв. После преобразования трансмиссией этот момент передается на каждое ведущее колесо машины в виде Mк и заставляет колесо вращаться, т. е. создает сдвигающую силу Fкт=Mк/R в точке контакта колеса с дорогой, причем эта сила через колесо приложена к дороге. Поверхность дороги препятствует вращению колеса силой трения Fрт той же величины, но приложенной к колесу и направленной противоположно. Чтобы показать, что силы действуют на разные объекты, точки приложения сил на рисунке условно немного разнесены по вертикали:
Эта сила реакции трения Fрт, умноженная на число ведущих колес, и движет машину. Применительно к Ниве разгоняющим усилием будет величина 4Fрт. Определим эту величину.
Максимальный крутящий момент Mдв=127 Н.м двигатель ВАЗ-21213 развивает при 3200-3400 об/мин (это паспортные данные двигателя 1,7). Значит, на первой передаче в КПП при пониженной в раздатке суммарный крутящий момент на колесах будет равен:
4Mк=Mдв.iт=127.30,629= 3890 Н.м.
При колесах штатного размера тяговое усилие всех четырех колес составит:
4Fрт=Mдв.iт/R=3890/0,343=11335 Н=1155 кГ.
При нормальной передаче в раздатке сила станет в 1,78 раза меньше и будет уменьшаться дальше при повышении передач в КПП. При тех же оборотах двигателя на пятой передаче тяговое усилие составит всего 152 кГ.
В узлах трансмиссии неизбежно существует трение. Согласно «Деталям машин» Д. Н. Решетова КПД закрытой среднескоростной цилиндрической одноступенчатой зубчатой передачи составляет около 98%, конической — около 97%. В коробке передач мы имеет две ступени (от первичного вала к промежуточному и от промежуточного к вторичному). Аналогично — две ступени в раздатке. Все эти передачи — цилиндрические. А в мостах — гипоидные передачи, близкие к коническим. Поэтому КПД трансмиссии будет приблизительно равен:
К этому добавятся еще потери на трение в карданах, ШРУСах и подшипниках. Поэтому из-за трения в узлах трансмиссии реальные значения усилий будут примерно на 10-15% меньше рассчитанных.
Вспомним о силе трения и коэффициенте трения между колесом и поверхностью дороги. Если Fкт=Mк/R меньше максимальной силы трения Fрт max, машина будет нормально разгоняться силой 4Fрт. Если же Mк/R>Fрт max, то избыток крутящего момента пойдет просто на раскручивание ведущих колес — они начнут буксовать.
О силах, противодействующих разгону автомобиля на горизонтальной дороге, можно почитать статьи, скопированные с сайта autotheory.by.ru: «Момент сопротивления качению» и «Аэродинамическое сопротивление автомобиля».
Особое внимание обратим на последний фактор — сопротивление воздуха растет пропорционально квадрату скорости и после 100 км/час на горизонтальном участке дороги оно превышает все иные противодействующие движению силы, взятые вместе. В результате именно сопротивление воздуха определяет максимальную скорость автомобиля.
Разгон и торможение
По второму закону Ньютона суммарная сила Fрт всех ведущих колес разгоняет автомашину массой mа с ускорением a. Но часть крутящего момента расходуется на раскручивание колес. Рассмотрим этот вопрос подробнее.
По принципу суперпозиции движение колеса можно рассматривать как сумму двух движений: прямолинейное вместе со всей машиной со скоростью V и вращение вокруг оси:
Если колесо не проскальзывает относительно поверхности (нет заноса), мгновенная скорость в зоне контакта (самой нижней точке колеса) должна быть равна нулю — там прямолинейная скорость движения машины (и оси колеса) V компенсируется такой же по величине, но противоположно направленной скоростью вращения назад. А в самой верхней точке скорость вращения колеса складывается с прямолинейной скоростью и оказывается равной 2V. При таком вращении угловая скорость колеса равна w=V/R.
Что такое момент инерции: формулы для стержня и колеса
Любые перемещения тел в пространстве, траектория которых является окружностью, предполагают знание не только угловой скорости, но и момента инерции для описания этого движения. Что такое момент инерции, а также чему он равен для стержня и колеса, ответит данная статья.
Вращение и момент инерции
Физическая величина, которая называется моментом инерции, обозначается, как правило, буквой I и появляется в физике при рассмотрении момента импульса материальной точки, которая вращается вокруг оси. Момент импульса L в скалярной форме записывается следующим выражением:
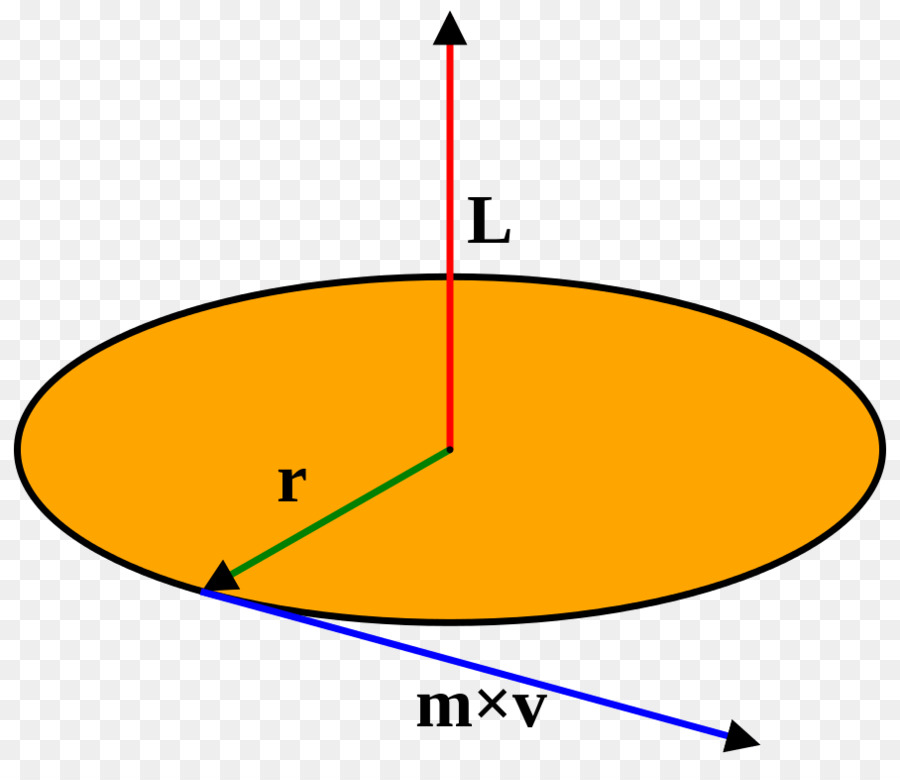
L = r 2 *m*ω, где ω = v/r
Общее выражение для момента инерции
Введенная в предыдущем пункте формула для величины I справедлива, если размеры объекта пренебрежимо малы по сравнению с дистанцией до оси r (вращение Земли вокруг нашей звезды). Если же линейные размеры объекта становятся сравнимыми с расстоянием r, тогда необходимо для вычисления I пользоваться более общей формулой, которая дана ниже:
Из нее видно, что подынтегральное выражение представляет собой момент инерции материальной точки. Сумма же всех моментов от точек с массой dm составляет полный момент инерции I для всего тела.
Эта формула является мощным инструментом для определения I тела абсолютно любой формы. Согласно формуле величина I является аддитивной, то есть позволяет разбить тело на отдельные части, вычислить их моменты инерции, а затем сложить полученные результаты для получения величины I тела.
Физический смысл величины I
Зная, что такое момент инерции, необходимо сказать несколько слов о том, как его значение отражается на поведении и характеристиках вращения реальных объектов.
Приведенное выше обсуждение говорит о том, что момент инерции характеризуется инерционностью процесса вращения, то есть выполняет ту же самую роль, что и масса тела при приложении к ней силы с целью придания ускорения.
Отличие массы и момента инерции заключается не только в единицах измерения, но и в том, что последний является функцией вращательной системы, а не только геометрии тела и его массы.
Момент инерции относительно оси вращения, пересекающей центр масс стержня
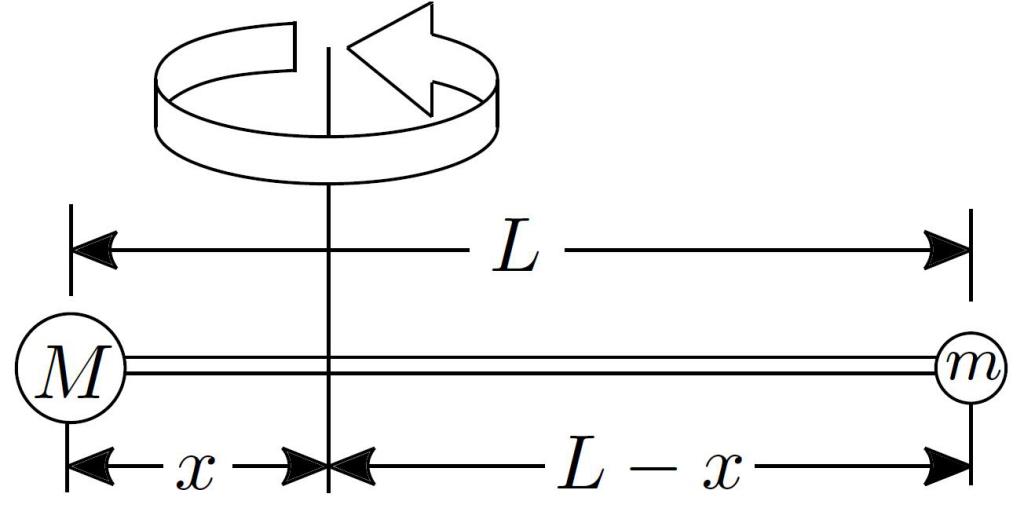
Рассмотрим пример использования интегральной формулы для решения реальных задач. Первым делом решим простую проблему: имеется стержень тонкий длиной l и массой m. Вращения оси проходит перпендикулярно этому стержню через центр массы объекта. Необходимо определить величину I для этой системы.

Выпишем общую формулу для инерции момента стержня относительно оси, имеем:
Поскольку ось перпендикулярна рассматриваемому телу, и сам стержень имеет бесконечно малую толщину, то можно мысленно разрезать его на тонкие слои плоскостями, параллельными оси. В таком случае получаем, что элемент массой dm может быть представлен следующим равенством:
Заметим, что подставленные пределы интегрирования по r соответствуют условию задачи (ось делит стержень на две равные части). Выполняя интегрирование, получаем:
I = ρ*S*(r 3 /3)| +l/2 -l/2 = m*l 2 /12, где m = ρ*S*l
Таким образом, момент инерции стержня тонкого, когда ось проходит через центр масс, в 12 раз меньше такового для материальной точки той же массы, находящейся на расстоянии l от оси.
Величина I для стержня с осью вращения на конце объекта
Рассмотрим, что такое момент инерции, в несколько иной ситуации. Имеем тот же самый объект (тонкий стержень), но теперь ось проходит через конец. Как изменится момент инерции в этом случае? Применяем тот же метод разбиения стержня и последующего интегрирования, как в предыдущем пункте, получаем:
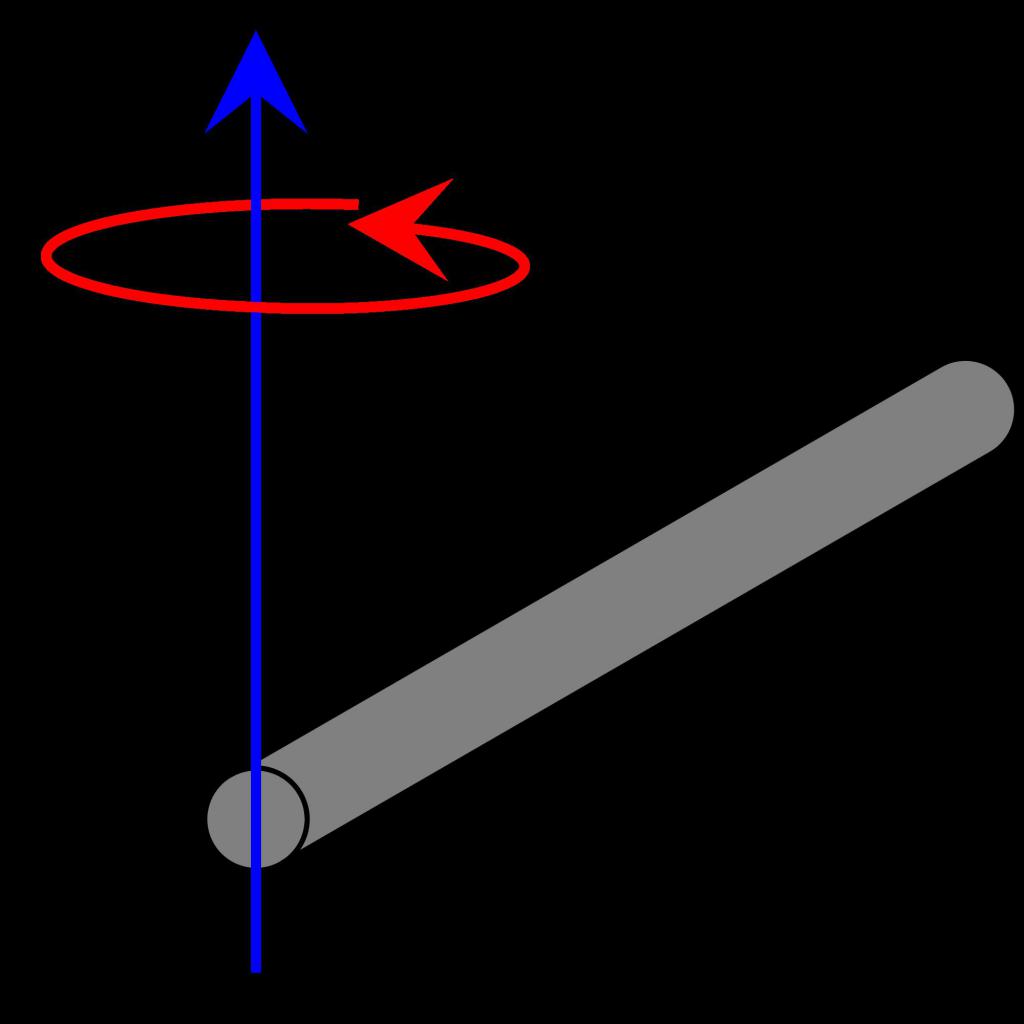
Заметим, что изменились лишь пределы интегрирования. Решением будет следующее равенство:
Выражение показывает, что тот же самый стержень будет обладать в 4 раза большим моментом инерции (труднее раскрутить), если ось вращения переместить с его центра на край.
Рассматривая решение этих двух задач, следует сделать важный вывод: при расчете величины I нельзя сводить всю массу объекта в его центр и выполнять расчет, как для материальной точки. Вычисление следует проводить только с использованием интегрального выражения.
Значение I для колеса со спицами
Что касается обода колеса, то его момент инерции аналогичен таковому для материальной точки, находящейся на расстоянии радиуса колеса и имеющей массу обода.

Складывая моменты инерции всех элементов, получаем:
Момент инерции автомобиля: что это такое и с чем его едят?
Здравствуйте! Я рад приветствовать вас в своём новом блоге, в котором я по мере возможностей собираюсь рассказывать об интересных инженерно-технических аспектах спорта, прежде всего автоспорта, благо образование позволяет мне быть достаточно компетентным в этих вопросах (я окончил МГТУ им. Баумана по специальности «Автомобиле- и тракторостроение»). Какой-то регулярности в постах, скорее всего, не будет, писать буду по настроению и исходя из наличия времени. И, кстати, приглашаю всех к сотрудничеству. Вы можете написать с инженерной точки зрения, к примеру, о том, почему кривые палки в биатлоне лучше (или хуже?), как устроена машина для заливки льда в хоккее или по какой технологии производят футбольный мяч. Свои посты я постараюсь ориентировать на максимально широкий круг читателей, объясняя всё как можно более подробно и используя минимум формул.
Сегодня – дебютная запись, о моменте инерции автомобиля вокруг вертикальной оси.
Момент инерции тела – это мера инертности этого тела во вращательном движении, по аналогии с массой в поступательном движении. Помните второй закон Ньютона: Ускорение= Сила/Масса. Поэтому для достижения большего ускорения можно либо увеличивать силу (а форсировка двигателей в автоспорте обычно ограничена регламентами), либо снижать массу (что тоже, кстати, иногда ограничивают). Вот и во вращательном движении также: Угловое ускорение=Момент сил/Момент инерции.
Представьте себе автомобиль, которому надо войти в вираж. Для этого водителю необходимо совершить поворот автомобиля относительно центра поворота, находящегося обычно приблизительно на продолжении задней оси.

Я представляю себе поворачивающий автомобиль примерно так
Чем большей линейной скорости прохождения виража хочет добиться водитель, тем быстрее ему нужно заправлять автомобиль в поворот, т.е. увеличивать угловое ускорение автомобиля. По формуле с предыдущего абзаца видно, что для этого нужно либо увеличивать момент сил, которые заправляют автомобиль в поворот, либо снижать момент инерции. Однако беспредельно увеличивать момент сил не получится: он создаётся боковыми реакциями в пятнах контакта шин с дорогой и определяется сцепными свойствами резины с асфальтом. Опытный гонщик очень быстро найдёт предельную скорость и будет реализовывать максимально возможный момент сил для вкручивания автомобиля в поворот (при его превышении последует снос или занос). Таким образом, для того, чтобы выиграть при прохождении поворота ещё немного времени, следует бороться с моментом инерции автомобиля вокруг вертикальной оси.
Что же такое момент инерции автомобиля вокруг вертикальной оси, проходящей через центр масс? Если мысленно разбить автомобиль на элементарные массы, то сумма произведений этих элементарных масс на квадрат расстояния от них до вертикальной оси и даст нам момент инерции относительно этой оси. Отсюда выводятся два пути по снижению момента инерции: располагать все узлы и агрегаты как можно ближе к центру масс и бороться за снижение массы. Кстати, во втором пути регламент не будет помехой: можно снизить массу и ниже требований регламента, а требуемый минимум веса добрать размещением балласта прямо в центре масс. Если вы посмотрите ещё раз на приведённую формулу, то увидите, что от такого размещения балласта момент инерции не увеличивается: расстояние до центра масс – ноль!
Момент инерции является очень важной массовой характеристикой автомобиля, поэтому его определяют ещё на этапе компоновки, назначая габариты, положение и массы узлов и агрегатов.

При равных габаритах и массах агрегатов момент инерции вокруг вертикальной оси будет меньше у нижнего автомобиля
Напоследок два примера по снижению момента инерции из столь любимого мной WTCC:
1. Летом прошлого года Лада в качестве одного из обновлений поставила облегчённые фары вместо стандартных. Об этом говорили все, но, по сути, счёт сброшенному от этого технического решения весу шёл на десятки, максимум на сотни грамм. Другое дело – момент инерции: фары располагаются очень далеко от центра масс, поэтому даже небольшое снижение их веса значительней сказывается на снижении момента инерции, чем, к примеру, облегчение сидений или рулевого колеса.
2. В прошлом году Гранта с пилотом весила около 1120 кг (при оговорённом регламентом минимуме 1100 кг). Новая Веста похудела на 70 кг, а значит, лишние полсотни килограмм можно расположить, во-первых, как можно ниже (для снижения центра тяжести), а во-вторых, как можно ближе к центру масс (для снижения момента инерции). Конечно, регламентом WTCC оговорено место закрепления балласта (где-то в районе отсутствующего переднего пассажирского сиденья), однако небольшая вариабельность его размещения всё равно остаётся. Уверен, инженеры Лады воспользовались ей по максимуму.
На этом о моменте инерции всё. Если вам хочется почитать ещё о чём-нибудь интересном, оставляйте варианты в комментариях. Пока планирую в следующей статье порассуждать на тему, в какой же момент необходимо переключать передачи для достижения максимально эффективного разгона.
Моменты инерции колес автомобиля
| Автомобиль | ЗИЛ-130 | ГАЗ-53А | ГАЗ-24 |
  , кгм 2 , кгм 2 | 12,6 | 7,3 | 1,0 |
 (31)
(31)
где J кз – искомый момент инерции; J кс – справочный момент инерции.
Инерционные массы изготавливается из стали, в виде набора дисков. Радиус дисков берется не более 0,3 м. Ширина набора дисков:
 , м (32)
, м (32)
Модность, необходимая для разгона автомобиля на стенде в интервале скоростей V 1…V 2.
 , л.с. (33)
, л.с. (33)
Для грузовых автомобилей и автобусов интервал скоростей V 1… V 2 берется в пределах 50. 60 км/ч, а для легковых – 60. 100 км/ч. На этих участках в нижней скоростной характеристике без больших погрешностей можно считать, что:
 ; а
; а  , (34)
, (34)
где  и
и  – соответственно, угловые скорости вращения роликов при скоростях V 1 и V 2;
– соответственно, угловые скорости вращения роликов при скоростях V 1 и V 2;  – время разгона в интервале скоростей V 1…. V 2.
– время разгона в интервале скоростей V 1…. V 2.
Если выразить угловые скорости через линейные, то получим:
 ;
;  (35)
(35)
 (36)
(36)
Отсюда время разгона автомобиля на стенде:
 (37)
(37)
Максимально допустимое время разгона при снижении мощности двигателя на 15 %:
 (38)
(38)
В формулах (37) и (38):
 (39)
(39)
Расчёт основных параметров роликовых стендов
Для проверки тормозов
Стенды для проверки тормозов (СПТ) подразделяются на инерционные и силовые. Геометрические параметры стенда l, b, a и L определяются совершенно аналогично, с той лишь разницей, что при проектировании СПМ рассматривалось равновесие вращающего колеса при неподвижном ролике в момент выезда, а при проектировании СПТ рассматривается равновесие системы при вращающемся ролике и неподвижном колесе (рис. 18). Инерционный СПТ строится по схеме, показанной на рис. 19.
Принцип действия инерционного СПТ заключается в следующем. Колеса автомобиля, помещенные на ролики стенда, разгоняются с помощью электродвигателей до скорости 42. 45 км/ч.
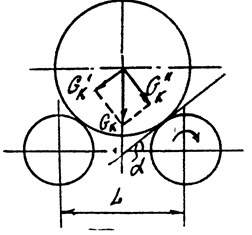
Рис. 18. Схема взаимодействия колеса и роликов стенда проверки тормозов
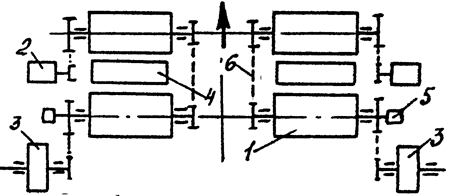
Рис. 19. Инерционный стенд проверки тормозов:
1 – ролик; 2 – электродвигатель; 3 – инерционная масса; 4 – подъемник;
5 – датчик пути и скорости; 6 – цепная передача
Затем электродвигатели отключаются и механическая система «стенд-колеса» переходит в режим выбега. При достижении скорости 40 км/ч оператор нажимает педаль тормоза автомобиля, осуществляя экстренное торможение до полной остановки роликов. В качестве оценочных параметров часто используется тормозной путь, реже – время торможения или замедление роликов стенда. Для приближения стендовых условии испытании к дорожным, инерционные ОПТ оборудуются инерционными массами.
В соответствии с правилами №13 ЕЭС ООН и ОСТом 37.001.016-70 минимальное значение тормозного пути при начальной скорости торможения 40 км/ч должно быть не более 17,2 и для автомобилей и 21,1 м – для автопоездов.
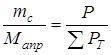
Для обеспечения равенства величин тормозных путей на стенде и на дороге при равенстве начальных скоростей и времени нарастания тормозного момента необходимо соблюдение условия:
 (40)
(40)
где  ,
,
– приведенная масса вращающихся деталей стенда, кг; Mапр – приведенная масса автомобиля при движении по дороге, кг; Р – тормозная сила на колесах, приложенная к роликам стенда, Н;  – сумма тормозных сил при торможении на дороге, Н.
– сумма тормозных сил при торможении на дороге, Н.
Величины Мапр и  вычисляются по следующим формулам:
вычисляются по следующим формулам:
 , Н (42)
, Н (42)
где Ма – масса автомобиля, кг; fg – коэффициент сопротивления качения колеса на дороге; Рw – сила сопротивления встречного потока воздуха, Н.
Пренебрегая сопротивлением качения и сопротивлением встречного потока воздуха, можно считать, что:
 (43)
(43)
где  – коэффициент сцепления шин автомобиля с дорогой. Для асфальтобетонного шоссе =0,6.
– коэффициент сцепления шин автомобиля с дорогой. Для асфальтобетонного шоссе =0,6.
Окончательно, приведенные массы одной тележки стенда для диагностирования передних и задних колес соответственно:
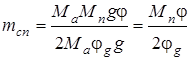 , кг (44)
, кг (44)
где Мп и М3 – массы автомобиля, приходящиеся на переднюю и заднюю оси, кг.
Окончательно, моменты инерции вращавшихся масс одной тележки стенда: 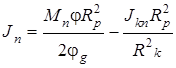 , кГм 2 (46)
, кГм 2 (46)
где Jкп и Jкз – моменты инерции передних и задних колес, находящихся на одной тележке стенда в процессе диагностирования автомобиля.
Поскольку стенд с изменяющимся моментом инерции масс изготовить довольно сложно, момент инерции следует выбирать по большому значению. Если стенд предназначен для диагностирования нескольких моделей автомобилей, момент инерции выбирает для наиболее тяжелого автомобиля. Это позволит обеспечить более высокую точность измерения тормозного пути.
После расчета момента инерции задают кинематику стенда и определяют основные размеры инерционных масс. На инерционном стенде проверки тормозов конечная скорость разгона автомобиля составляет 42. 45 км/ч. При пуске электродвигателя на его вал действует приведенный момент от сил сопротивления качения колес по роликам, момент сопротивления холостого хода стенда, момент от сил инерции вращающихся частей стенда и так далее. Электродвигатель инерционного роликового стенда выбирается по величине пускового момента на его валу.
 (48)
(48)
где  – КПД передачи, связывавшей электродвигатель с роликами; M с хх – момент сопротивления холостого хода стенда, приведенный к валу электродвигателя кгс·м, iрэ – передаточное число передачи, связывающей ролики и электродвигатель; iмэ – передаточное число передачи, связывающей маховик инерционных масс и электродвигатель; Jm, Jp, Jk – моменты инерции соответственно, маховика, ролика, одинарного колеса автомобиля, кг·м 2 ; Zm, Zp, Zk – число маховиков, роликов и колес, раскручиваемых одним электродвигателем; V – линейная скорость движения автомобиля, м/с; tp – время разгона автомобиля, с.
– КПД передачи, связывавшей электродвигатель с роликами; M с хх – момент сопротивления холостого хода стенда, приведенный к валу электродвигателя кгс·м, iрэ – передаточное число передачи, связывающей ролики и электродвигатель; iмэ – передаточное число передачи, связывающей маховик инерционных масс и электродвигатель; Jm, Jp, Jk – моменты инерции соответственно, маховика, ролика, одинарного колеса автомобиля, кг·м 2 ; Zm, Zp, Zk – число маховиков, роликов и колес, раскручиваемых одним электродвигателем; V – линейная скорость движения автомобиля, м/с; tp – время разгона автомобиля, с.
Предварительные расчеты показали, что момент сопротивления холостого хода стенда, изображенного на рис. 8, составляет около 2% от общего момента и им можно пренебречь.
Передаточное число передачи, связывающей ролики и электродвигатель, выбирается из условия:
 , (49)
, (49)
где nе=750, 1000, 1500 или 3000 – синхронная частота ротора электродвигателя, об/мин.
Передаточное число передачи, связывающей маховик инерционных масс и электродвигатель:  , (50)
, (50)
где imр – передаточное число передачи, связывающей инерционные массы и ролики. Как правило, ролики соединяются с маховиками масс ускоряющей передачей с imр=0,5. 0,3.
Время разгона следует стремиться сделать возможно меньшим. Для практических расчетов tp=3,0. 4,0 с.
При выборе электродвигателя инерционного стенда следует учесть, что на нем может диагностироваться автомобиль с тормозами, затянутыми после выполнения ремонтных и регулировочных работ. При незначительной затяжке тормозов водитель может даже не замечать этого, однако электродвигатель будет перегружаться.
Степень нагрузки двигателя можно определить с учетом следующих допущений:
1) автомобиль, у которого затяжка тормозов обнаруживается водителем, на стенд не устанавливается;
2) минимальная перетяжка обнаруживается при разгона автомобиля на прямой передаче, когда тяговое усилие уменьшается более чем на 25%.
Практика эксплуатации автомобилей показала, что субъективно водители снижение мощности двигателя на 15%, как правило, не замечают.
С учетом этого, дополнительная сила сопротивления вращения роликов за счет перезатяжки тормозов:
 , (51)
, (51)
где Мдв – момент, развиваемый двигателем диагностируемого автомобиля, Н·м.
Окончательно, формула для вычисления пускового момента будет иметь вид:
 , Н·м (52)
, Н·м (52)
Если в справочнике до пусковому моменту, выбор электродвигателя можно произвести по его мощности:
 , кВт (53)
, кВт (53)
где К – отношение начального пускового момента к номинальному. Для большинства асинхронных двигателей серии 4А, К = 1,2. 1,4.
Главным достоинством инерционных СПТ является имитация, приближенных к дорожным, условий работы тормозных механизмов автомобиля.
К недостаткам инерционных СПТ следует отнести громоздкость, большую металлоемкость, большую, порядка нескольких десятков киловатт, мощность приводных электродвигателей.
Более компактны и менее энергоемкие силовые СПТ. Принцип их действия заключается в принудительном прокручивании затормаживаемого колеса с одновременным измерением тормозной силы. Линейная скорость вращения роликов не превышает 4. 6 км/ч.
В качестве примера конструктивного исполнения на рис. 20 показана кинематическая схема стенда предназначенного для диагностирования тормозов автомобилей силовым методом.
Особенностью проектирования силового СПТ является подбор редуктора и приводного электродвигателя.
Передаточное число редуктора:
 , (54)
, (54)
где V=4. 6 км/ч – линейная скорость движения автомобиля на стенде;  м – радиус роликов стенда.
м – радиус роликов стенда.
Мощность электродвигателя выбирается из условия обеспечения вращения роликов при максимальной затормаживающей силе:
 , Н, (55)
, Н, (55)
где  =0,56 – коэффициент сцепления материала шины с роликами стенда; fр=0,03 – коэффициент трения качения колеса по роликам стенда.
=0,56 – коэффициент сцепления материала шины с роликами стенда; fр=0,03 – коэффициент трения качения колеса по роликам стенда.
С учетом КПД редуктора, мощность электродвигателя:
 , (56)
, (56)
где  – КПД редуктора.
– КПД редуктора.
С учетом мощности электродвигателя окончательно подбирают редуктор и уточняют линейную скорость движения автомобиля, которая должна быть в пределах 4. 6 км/ч.
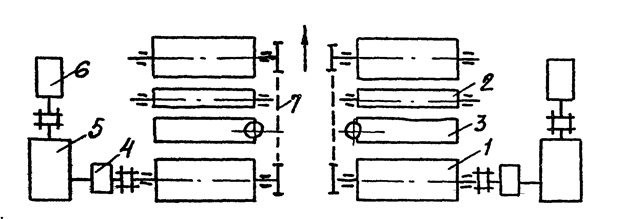
Рис. 20. Схема силового стенда:
1 – ролик; 2 – антиблокировочный ролик; 3 – подъемник;
4 – датчик тормозной силы; 5 – редуктор; 6 – электродвигатель;
7 – цепные передачи
Монтаж и эксплуатация стенда
Дата добавления: 2019-11-16 ; просмотров: 286 ; Мы поможем в написании вашей работы!