Электростанции

Навигация
Меню раздела
Временные диаграммы
Временные диаграммы, также называемые импульсными диаграммами, являются вспомогательным средством для лучшего понимания работы триггера и всей схемы в целом.
Входные сигналы временных диаграмм заданы заранее или могут выбираться любыми. Выходные сигналы зависят от входных сигналов.
Поясним сказанное на простом примере. На рис. 7.88 изображен не тактируемый ^S’-триггер, так называемый ЛУ-триггер хранения с таблицей истинности и временными диаграммами. Таблица истинности действительна для момента времени t.
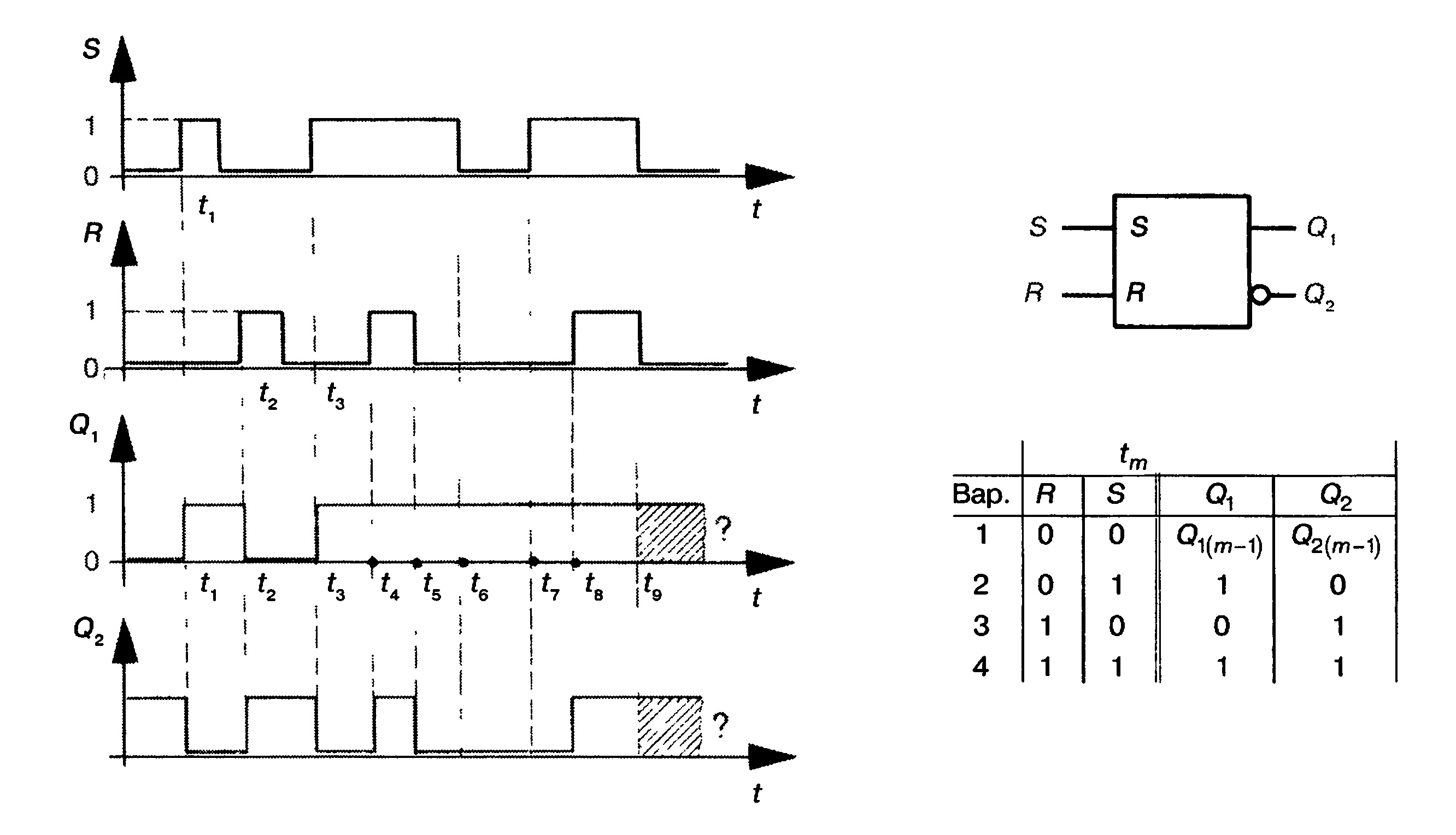
Рис. 7.88. RS-триггер хранения с таблицей истинности для момента времени tm и временной диаграммой
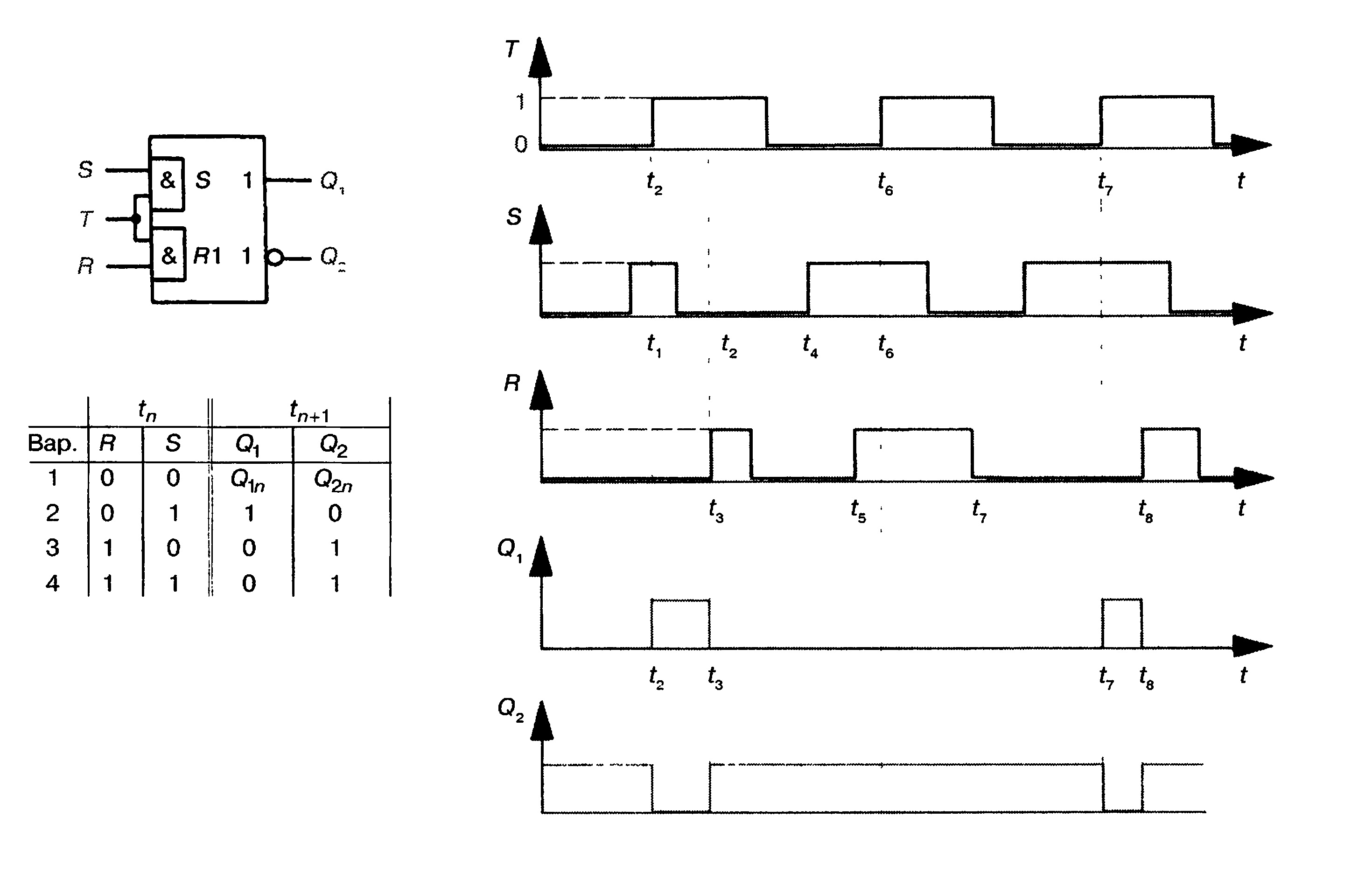
Рис. 7.89. Тактируемый RS-триггер с доминирующим R-входом, таблицей истинности и временной диаграммой
Так как тактирующий сигнал не включен, то эти сигналы не оказывают влияния на триггер. Только в точке t6 они действуют на триггер. Теперь триггер должен был бы сброситься. Однако он уже сброшен и, следовательно, состояние выходов не изменяется.
В точке t7 триггер устанавливается. В точке t% происходит сброс, так как несмотря на единичные состояния S и R входов, 7?-вход имеет приоритет. Состояние выхода Q2 находится всегда в противофазе к состоянию выхода Qv Какая временная диаграмма, соответствует Ql и Qv если бы RS-трттор с доминирующим jR-входом управлялся по переднему фронту синхроимпульса? Соответствующая временная диаграмма представлена на рис. 7.90. Триггер можно переключать только в моменты времени tv tv ty В точке tx триггер будет установлен, так как S = 1. В точке t2 триггер сбрасывается, так как S = R = 1. В точке t3 триггер снова устанавливается (S = 1). Для Qx и Q2 получается совершенно другая диаграмма, чем на рис. 7.89.
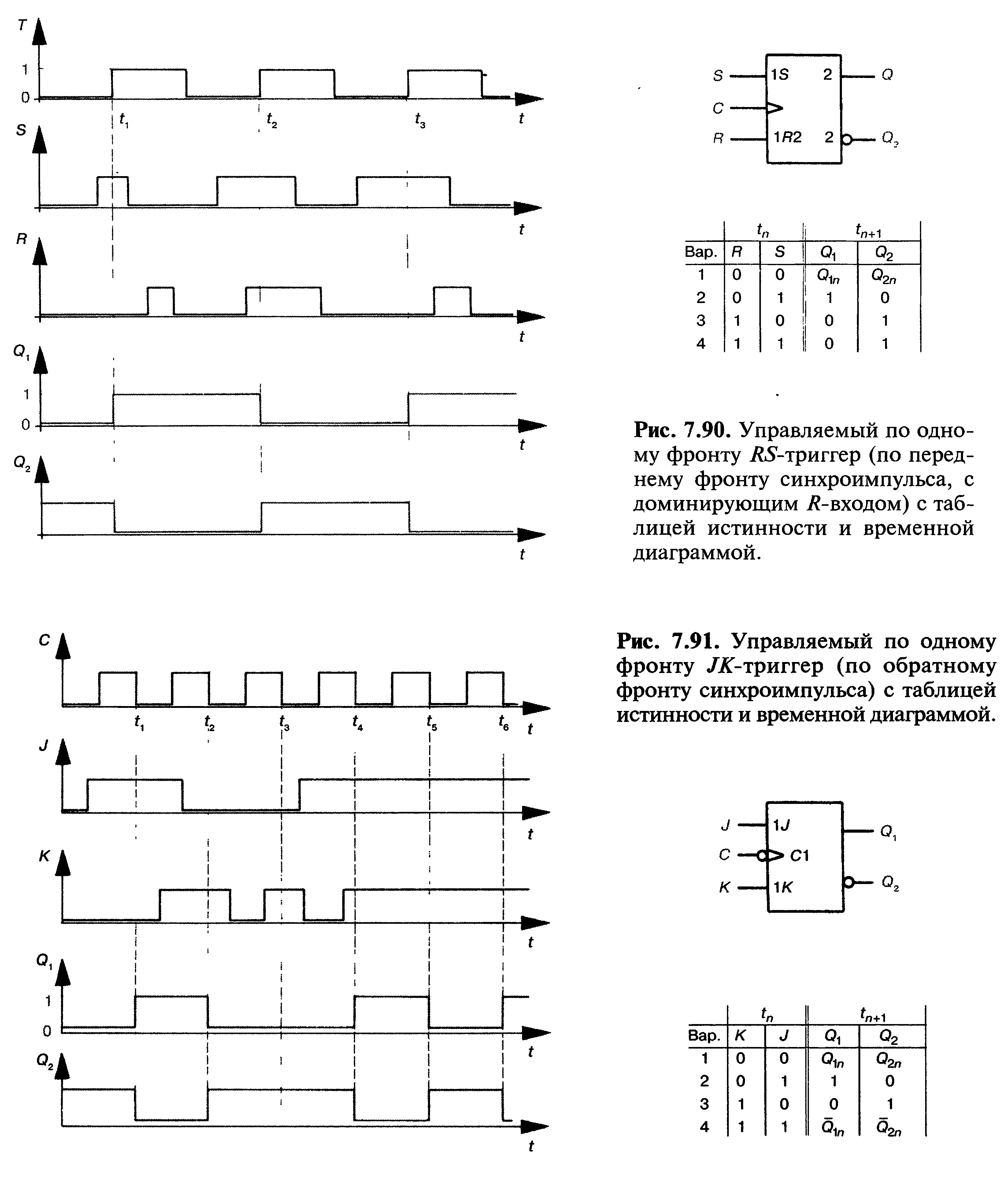
Для управляемого по одному фронту /ЙГ-триггера на рис. 7.91 получается следующая временная диаграмма. Триггер может переключаться только в моменты времени tv t2, t3, t4, ts и t6. Только в эти моменты времени подаются задние фронты С-сигнала.
В точке tx триггер установится, так как /= 1. В точке tx триггер сбросится, так как К — 1. В момент времени t3 триггер должен был бы сброситься, однако так как он уже сброшен, то состояния выходов Qx и Q2 не изменяются.
В точке t4 /= 1 и К= 1. Триггер переключается. Так как перед моментом времени Qx был равен 0, то после t4 Qx = 1. В точках ts и t6 триггер переключается в противоположное состояние. Состояние выхода Q2 всегда находится в противофазе к состоянию выхода Qx.
В качестве следующего примера рассмотрим временные диаграммы управляемого по двум фронтам /А’-триггера (рис. 7.92). В точке tx входной сигнал / = 1 поступает в ведущий триггер. И только в момент времени t2 (с обратным фронтом синхроимпульса) на выходах появляются сигналы, соответствующие режиму установки Qx — 1 и Q2 = 0.
В момент времени Г3 / = 0 и К = 0. Это режим хранения. Поэтому в точке /4 состояния выходов не меняются.
В точке t5 входной сигнал К= 1 поступает в ведущий триггер. Но лишь в момент времени t6 на выходах появляются сигналы, соответствующие режиму сброса Qx = 0 и Q2= 1.
В момент времени t7 J = 1 и К = 1. При такой комбинации входных сигналов триггер переключит выходы в состояния, противоположные текущим, но только в момент времени tr
В точке t9 AT становится равным 1. Сброс выходных сигналов происходит в точке tl0.
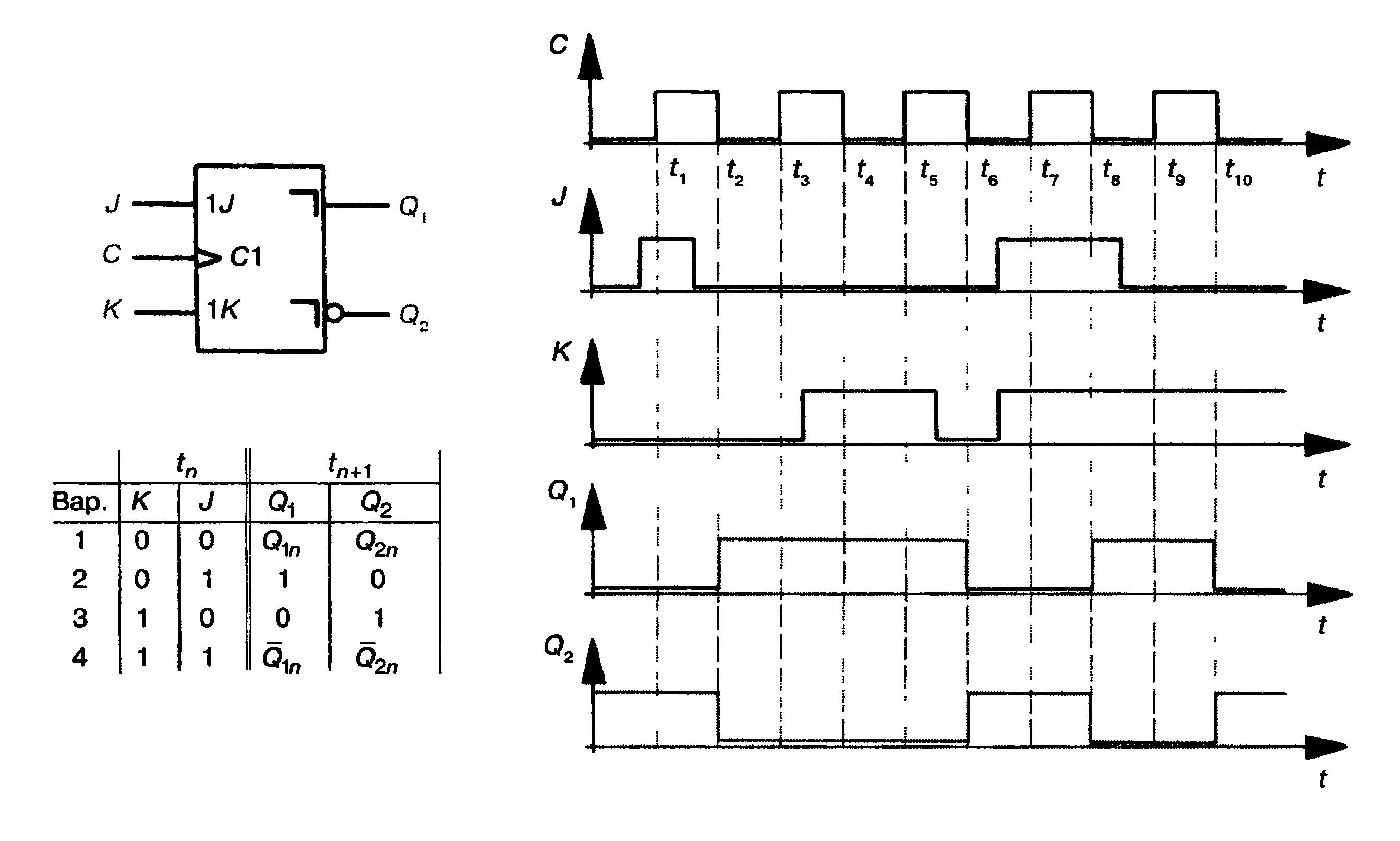
Рис. 7.92. Управляемый по двум фронтам JK-триггер (MS-триггер) с таблицей истинности и временной диаграммой
Исследование временных диаграмм преобразователя кода
Исследование функционирования преобразователя кода производится в динамическом режиме с помощью логического анализатора.
Выполнить следующие установки в блоке Clock Set. на панели анализатора:
Clock Mode – Internal (задает внутренний режим запуска от самих исследуемых сигналов);
Internal clock rate – 8 кГц (частота тактовых импульсов);
Threshold voltage (V) – 1,3 (порог срабатывания анализатора).
Запустить программу моделирования и, когда на экране анализатора заполнятся диаграммы напряжений, остановить процесс моделирования кнопкой Pause. Выбрать подходящий масштаб по оси времени с помощью установки Clocks per division, так чтобы на развертке укладывался полный цикл работы преобразователя.
Зарисовать для отчета временные диаграммы сигналов на всех входах и выходах схемы. Пример диаграмм показан на рис. 3.

Рис. 3. Временные диаграммы преобразователя кода
4. Контрольные вопросы
1. Каковы основные признаки комбинационных схем?
2. В чем сущность синтеза комбинационных схем?
3. В чем специфика синтеза многовыходных комбинационных схем?
4. Почему задача синтеза неоднозначна?
5. Какие критерии минимизации применяют при синтезе комбинационной схемы?
6. Для чего предназначены схемы преобразователей кодов?
7. Какие существуют методы построения схем преобразователей кодов?
Cодержание отчета
Отчет должен содержать:
2) наименование работы и цель исследований;
3) результаты синтеза преобразователя кода (карты Карно, обоснование выбора элементной базы, схема преобразователя);
4) схема установки для исследования преобразователя кода на рабочем поле программы Electronics Workbench;
5) результаты исследования работы преобразователя кода в динамическом режиме (временные диаграммы входных и выходных сигналов).
Основные учебники и учебные пособия
33. Курсовое проектирование по дисциплинам «Общая электротехника и электроника», «Электротехника и электроника» и «Электроника» /В.И. Иванов, В.В. Губанов / Курск.– Изд.-во Курск. гос. с.-х. ак., 2012. – 35 с.
Учебная литература электронно-библиотечной системы «ЛАНЬ»
(доступ из ЭБС «ЛАНЬ»)
31. Белов Н. В. Электротехника и основы электроники [электронный ресурс]: учебник / Белов Н. В., Волков Ю. С. Издательство «Лань»: 1-е изд.—2012.- 432 с. ISBN 978-5-8114-1225-9:
32. Ермуратский П.В. Электротехника и электроника[электронный ресурс]: учебник / Ермуратский П.В. Лычкина Г.П. Минкин Ю.Б. Издательство«ДМК Пресс»: 2011: 417 стр. ISBN 978-5-94074-688-1
Дополнительная литература
31. Гусев В.Г. Электроника и микропроцессорная техника: Учебник для вузов/В.Г. Гусев, Ю.М. Гусев. – 3-е изд. – М.: Высш. шк., 2004. – 790 с.
32. Опадчий Ю.Ф. и др. Аналоговая и цифровая электроника (Полный курс): Учебник для вузов / Ю.Ф. Опадчий, О.П. Глудкин, А.И. Гуров; Под ред. О.П. Глудкина. – М.: Горячая Линия – Телеком, 2003. – 768 с.
33. Карлащук В.И. Электронная лаборатория на IBM PC. Программа Electronics Workbench и ее применение. М.: Солон–Р, 2001. – 726 с.
Методические указания к лабораторным работам
101. Генераторы линейно изменяющегося напряжения: методические указания по выполнению лабораторной работы / Юго-Зап. гос. ун-т; сост.: В. И. Иванов. Курск, 2011. 12 с.: Ил. 5, табл. 2. Библиогр.: с.12.
102. Генераторы прямоугольных импульсов: методические указания по выполнению лабораторной работы / Юго-Зап. гос. ун-т; сост.: В. И. Иванов, В. С. Панищев. Курск, 2011. 12 с.: Ил. 2, табл. 1. Библиогр.: с.12.
103. Импульсный стабилизатор напряжения: методические указания по выполнению лабораторной работы / Юго-Зап. гос. ун-т; сост. В. И. Иванов. Курск, 2011. 15 с.: Ил. 8, табл. 2. Библиогр.: с.15.

104. Линейный стабилизатор напряжения: методические указания по выполнению лабораторной работы / Юго-Зап. гос. ун-т; сост. В. И. Иванов. Курск, 2011. 10 с.: Ил. 2, табл. 1. Библиогр.: с.10.
105. Однокаскадный усилитель на биполярном транзисторе: методические указания по выполнению лабораторной работы / Юго-Зап. гос. ун-т; сост.: В. И. Иванов, В.С. Панищев. Курск, 2011. 14 с.: Ил. 4, табл. 1. Библиогр.: с.13.
Интернет-ресурсы
160 Бабичев Ю.Е. Электротехника и электроника /Метод. указания к самостоятельной работе студентов спец. 230400. //Babichev/et_e_s230400.doc (локальная сеть каф. ЭИС: 728; 731)
161 Бабичев Ю.Е. Электротехника и электроника /Метод. материалы для студентов спец. 230400. //Babichev/et_e_mat230400.doc (локальная сеть каф. ЭИС: 728; 731)
162 Бабичев Ю.Е. Электротехника и электроника /Лабораторные работы для студентов спец. 230400. //Babichev/et_e_lab230400.doc (локальная сеть каф. ЭИС: 728; 731)
163 http://www.toe.fvms.mirea.ru/ (Учебные материалы кафедры «Теоретические основы электротехники», МИРЭА);
164 http://fn.bmstu.ru/electro/ (сайт кафедры Общей электротехники МГТУ им. Н. Э. Баумана);
165 http://toe.stf.mrsu.ru/demo_versia/ (Общая электротехника и электроника: электронный учебник, Мордовский государственный университет);
166 http://window.edu.ru/window/library?p_rid=45110 (Тесты и контрольные вопросы по электротехнике и электронике, ДВГТУ);
167 http://window.edu.ru/window/library?p_rid=19575 (Методические указания к выполнению расчётно-графического задания по электротехнике, ОГУ);
168 http://window.edu.ru/window/library?p_rid=58854 (Электроника: сборник лабораторных работ, УлГТУ);
169 http://window.edu.ru/window/library?p_rid=40470 (Электротехника и электроника: учебное пособие);
171 http://www.electrolibrary.info (электронная электротехническая библиотека).г) программное обеспечение и материалы для интерактивных форм обучения
172 Электронное пособие по выполнению расчетно-графических заданий № 2 и 3. //Babichev/et_e_dz1dz2_230400.doc (локальная сеть каф. ЭИС: 728; 731)
173 Компьютерная программа схемотехнического моделирования TINA for Windows (The Complete Electronics Lab) ver. 7.0.20 SF-DS (свободно-распространяемая)
174 Компьютерная программа схемотехнического моделирования Electronics Workbench ver. 5.12.
Пример составления временной диаграммы и блок-схемы работы работы механизмов
Словесное описание проектируемого технологического процесса можно представить в виде графика изменения входных и выходных сигналов, который называется временной диаграммой технологического процесса.

Пример построения временной диаграммы осуществим на базе схемы линии предварительной очистки зерна.
Описание работы схемы
С помощью переключателя SA1 происходит выбор режима работы: автоматический – основной режим работы, ручной – режим пусконаладочных работ.
Режим пусконаладочных работ заключается в подаче питания через кнопки с фиксацией SB4-SB6 к катушкам магнитных пускателей механизмов линии в обход всей логики управления. В этом режиме оператор сам принимает решение по длительности работы линии или какого-то отдельного механизма, контроль заполнения бункера осуществляется только визуально.
Как правило, этот режим работы применяется либо при аварийных режимах работы, когда логика управления нарушена и необходимо завершить технологический процесс без утраты продукта на линии, либо при пусконаладочных работах, когда после ремонта какого-то механизма линии необходимо запустить только лишь его, а не все механизмы линии.
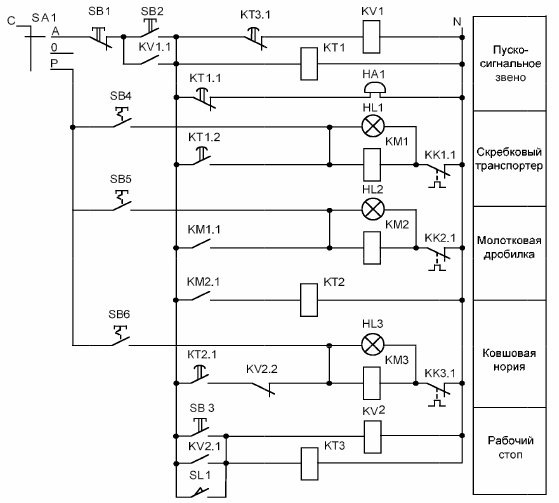
Рис. 1. Релейно-контактная схема управления линии предварительной очистки зерна
После переключателя режимов работы в схему управления включен блок пускосигнального звена, который позволяет, с задержкой по времени, одновременно отключить звонок и включить механизм скребкового транспортера. При составлении релейно-контактных схем последовательность включения или отключения механизмов реализуется посредством замыкающих контактов магнитных пускателей.
Так в нашем случае, если питание присутствует на катушке магнитного пускателя КМ1 (скребковый транспортер), то соответственно через контакт КМ1.1 питание также будет и на катушке магнитного пускателя КМ2 (молотковая дробилка).
Одновременно все механизмы линии запускать нецелесообразно, поскольку в процессе работы может возникнуть такой режим работы, когда электропривода двух механизмов линии еще не вышли на свой номинальный режим работы, а на них уже, через головной механизм, подается продукт, что приводит к аварийной остановке линии. Поэтому в схеме управления питание на катушку магнитного пускателя КМ3 головного механизма подается с временной задержкой, реализованной реле времени КТ2.
Механизмы линии все включены, осуществляется работа. Иногда во время работы наступает момент, когда бункер еще не полный, а линию необходимо отключить. В этом случае в схеме управления используют блок «рабочего стопа», который позволяет произвести отключение всех механизмов линии в правильной последовательности (по направлению движения продукта по линии).
Так при нажатии на кнопку SB3 включается промежуточное реле KV2, размыкающий контакт которого KV2.2 разрывает цепь с катушкой КМ3, отключается головной механизм линии. При этом реле времени КТ3 производит отчет времени работы линии на очистку механизмов от продукта.
После определенного времени контакт реле времени КТ3.1 разрывает цепь с промежуточным реле KV1, контакт которого является шунтирующим кнопку пуска. Это приводит к отключению всей схемы управления и, как следствие, остановке механизмов линии. Аналогичный алгоритм работы схемы управления при срабатывании датчика уровня в бункере SL1.
Защита электродвигателей линии от перегрузок в представленной схеме управления реализуется посредством размыкающих контактов тепловых реле КК1.1. КК3.1, которые установлены соответственно последовательно в цепях с катушками магнитных пускателей КМ1. КМ3.
Для визуального контроля работы механизмов линии в схеме управления установлены сигнальные лампы индикации HL1. HL3. При нормальном режиме работы механизмов линии, лампы индикации будут гореть. В случае аварийного отключения, питание в цепи с магнитным пускателем пропадает, и соответственно лампа индикации гаснет.
По схеме электрической принципиальной автоматическом режиме работы для линии предварительной очистки зерна необходимо 3 кнопки: SB1 «Стоп», SB2 «Пуск» и SB3 «Рабочий стоп», а также датчик уровня SL1. Таким образом имеем 4 входных элемента. Причём кнопки приняты с самовозвратом, т.е. без фиксации включённого состояния.
Пример построения временной диаграммы
Выходных элементов 4: звонок НА1, скребковый транспортёр КМ1, молотковая дробилка КМ2 и ковшовая нория КМ3.
При нажатии кнопки SB2 «Пуск» первым должно включиться пускосигнальное звено (звонок HA1) на 10 секунд для предупреждения персонала о том, что сейчас будет происходить запуск технологической линии.
Время работы механизмов определяется исходя из их производительности и объёма продукции. Производительность для скребкового транспортёра, молотковой дробилки и ковшовой нории примем 5 т/ч, 3 т/ч и 2 т/ч соответственно. Объём зерна определяется исходя из объёма бункера и килограмм зерна приходящихся на 1 м.
Зерно разных культур имеет разную форму, плотность и соответственно вес, следовательно, кубический метр каждого вида зерна не может весить одинаково.
Примем объём бункера 5 м. Загружаемое зерно – гречиха, которая весит 560 – 660 кг. Исходное состояние бункера – пустой. Тогда количество зерна в полном бункере: N = 580 х 5 = 2900 кг.
Меньшую производительность из всех механизмов имеет ковшовая нория, она же подаёт зерно на линию. Её время работы составит: t м3 = 2000/2900 = 0,689 ч = 41 мин.
Время работы остальных механизмов будет больше чем 41 минута и определяется исходя из логики работы схемы.
После включения скребкового транспортёра КМ1 и молотковой дробилки КМ2 им необходимо дать время на разгон. Время на разгон для всех механизмов принимаем – 10 секунд. Ковшовая нория КМ3 запускается последней (спустя 10 секунд после запуска КМ1 и КМ2) чтобы не создавать завала продукта на молотковой дробилке КМ2 и скребковом транспортёре КМ1. Спустя 41 минуту весь продукт необходимый для заполнения бункера пройдёт через ковшовую норию КМ3.
Датчик уровня SL устанавливается таким образом, чтобы сигнал о заполнении бункера поступил ещё до того, как остатки продукта пройдут через молотковую дробилку КМ2 и скребковый транспортёр КМ1.
При срабатывании датчика уровня SL1 отключается головной механизм КМ3 (через 41 минуту и 20 секунд после нажатия на кнопку SB2 «Пуск»). С выдержкой по времени одновременно отключаются КМ1 и КМ2. Данную выдержку времени можно принять равной 20 секунд.
Временная диаграмма для нормального режима работы показана на рисунке 2.
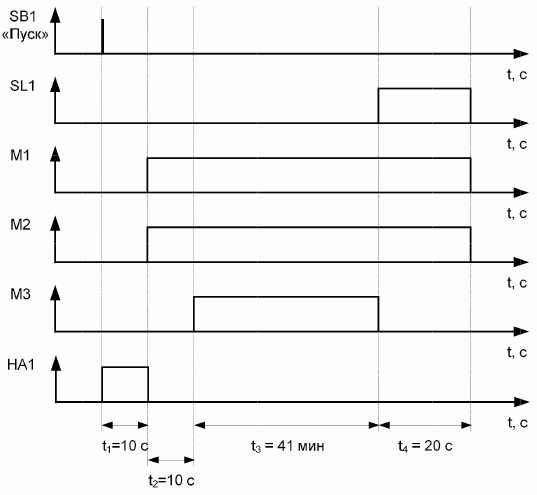
Рис. 2. Временная диаграмма для нормального режима работы
В режиме «Рабочий стоп» оператор может остановить процесс раньше, чем сработает датчик уровня SL1, поэтому в данном случаи время работы механизмов определить невозможно. В режиме «Общий стоп» сразу отключаются все механизмы.
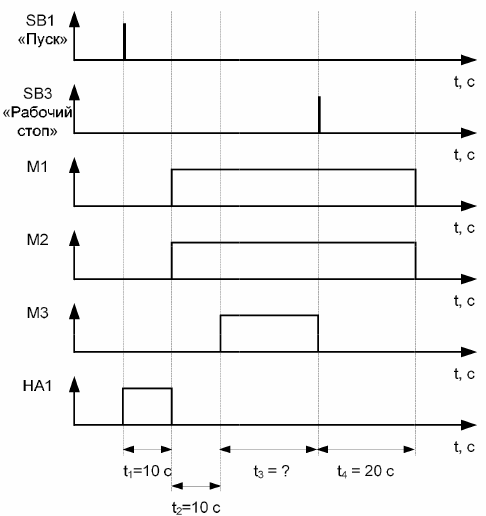
Рис. 3. Временная диаграмма для режима работы «Рабочий стоп»
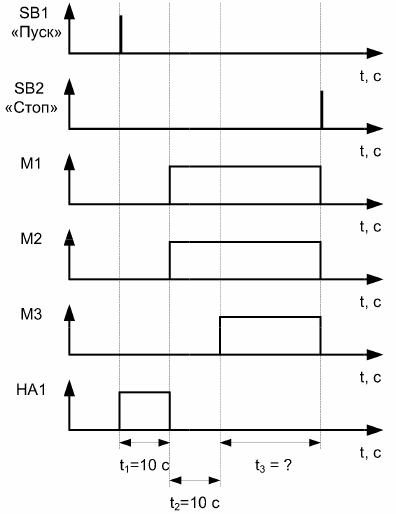
Рис. 4. Временная диаграмма для режима «Общий стоп»
Пример построения блок-схемы работы работы механизмов
Блок-схема работы технологического процесса должна наглядно показывать алгоритм его работы. Для этого используются специальные обозначения тех или иных действий.
На рисунке 5 показан пример блок-схемы для линии предварительной очистки зерна. В представленной блок-схеме показаны все возможные варианты работы технологического процесса. Ситуация «Авария» может возникнуть в любой момент работы линии предварительной очистки зерна после нажатия на кнопку SB2 «Пуск».
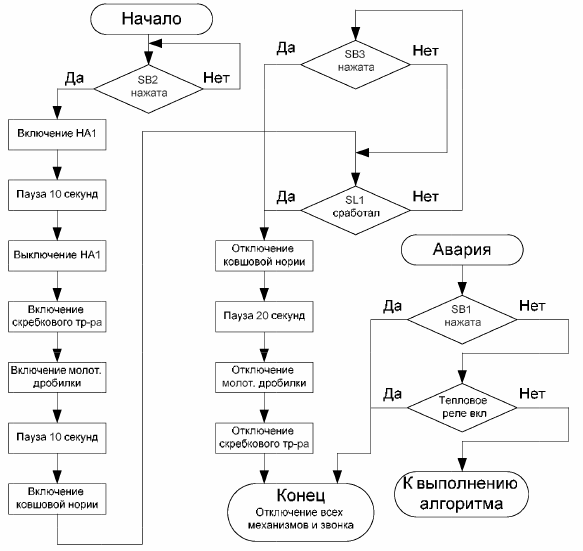
Рис. 5. Блок-схема работы линии предварительной очистки зерна
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Временные диаграммы

Импульсы U1 поступают на вход селектора, который открыт во время действия напряжения U3, сформированного из колебаний БОЧ U2. Это напряжение может иметь вид прямоугольного импульса длит.TИ, наз-ого стробирующим импульсом (строб-импульсом) или меткой времени. Таким образом, счетчик фиксирует число импульсов N (диаграмма U4), связанное с TХ и TИ очевидным соотношениемТИ = N TХ,
Откуда fХ =  , (4.1)
, (4.1)
30.Измерительные преобразователи временных интервалов в цифровой код. Устройство и принцип действия, временные диаграммы работы преобразователей. Основные метрологические характеристики и оценка погрешности преобразования.
При преобразовании ΔtХ необходимо сформировать опорный (старт) и интервальный (стоп) импульсы, которые фиксируют интервал времени измерения. Эти импульсы формируются с помощью ФУ3 и ФУ4, включенных на входах 3 и 4 цифрового преобразователя. Счету подвергаются импульсы, сформированные по аналогии с режимом измерения TХ. Преобразование периода исследуемых сигналов
При измерении TХ сигнал подается на вход 2, а БОЧ подключается к ФУ1 (см. рисунок 4.1). В этом случае интервал времени измерения определяется величиной TХ, а счетными являются импульсы, сформированные из напряжения U2 (рисунок 4.3). Для уменьшения шага квантования частота f0 может быть умножена в требуемое число раз. Таким образом, для этого режима работы
 , (4.2)
, (4.2)
 . (4.3)
. (4.3)

Возможность измерения одного или нескольких периодов TХ позволяет использовать этот режим для измерения кратковременной нестабильности частоты в реальном масштабе времени.

31Измерительные преобразователи фазового сдвига в цифровой код на основе метода преобразования фазового сдвига во временной интервал. Устройство и принцип действия, временные диаграммы работы преобразователей. Основные метрологические характеристики и оценка погрешности преобразования.
Преобразование измеряемой величины в интервал времени DtХ очень эффективно при построении средств измерений, предназначенных для измерения фазовых сдвигов. Суть метода поясняется рисунком 4.3.
Если с помощьюформирующих устройств (ФУ), аналогичных рисунку 4.1, преобразовать гармонические сигналы Um1 и Um2 (рисунок 4.3,а) в короткие импульсы напряжения U1 и U2 (рисунок 4.3,б,в), соответствующие моментам перехода U1 и U2 через нуль в положительном направлении, то интервал времени DtХ между ближайшими импульсами (рисунок 4.3,г) будет пропорционален преобразуемому фазовому сдвигу jХ. Действительно, по определениям
 и
и  , (4.8)
, (4.8)
 . (4.9)
. (4.9)
 а а | б |
а – однополупериодного, б – двухполупериодног.
во временной интервал
32. Аналого-цифровые преобразователи, реализующие параллельный способ преобразования. Устройство, принцип действия, основные метрологические характеристики преобразователей и оценка погрешности преобразования.
Самый быстрый метод преобразования аналогового сигнала (метод непосредственного считывания – способ параллельного преобразования)в цифровой состоит в подаче аналогового напряжения постоянного тока UВХ на набор параллельных компараторов напряжения с различными порогами срабатывания (рисунок 4.10). Пороги срабатывания формируются путем деления опорного напряжения постоянного тока UОП с помощью делителя напряжения, образованного набором последовательно соединенных резисторов R. Затем сигнал с выходов компараторов К поступает в логическую схему (шифратор) и превращается в цифровой код, несущий информацию о значении преобразованного аналогового напряжения.
Аналого-цифровые преобразователи, реализующие времяимпульсный метод преобразования. Устройство, принцип действия, основные метрологические характеристики и оценка погрешности преобразования.
В АЦП, реализующих времяимпульсный метод преобразования, измеряемая величина (в данном случае UХ=) предварительно преобразуется в пропорциональный ей интервал времени путем сравнения со значением известной величины, изменяющейся по определенному закону. Затем полученный интервал времени (также аналоговая величина) непосредственно преобразуется в цифровой код.
 Преобразователи с аналоговым интегрированием позволяют определить среднее значение измеряемого напряжения за определенный фиксированный интервал времени (интервал интегрирования). Распространенным способом аналогового интегрирования является двухтактное интегрирование, называемое еще двойным, двукратным, двухшаговым и поочередным. Упрощенная структурная схема такого преобразователя приведена на рисунке 4.13, а временные диаграммы его работы показаны на рисунке 4.14.
Преобразователи с аналоговым интегрированием позволяют определить среднее значение измеряемого напряжения за определенный фиксированный интервал времени (интервал интегрирования). Распространенным способом аналогового интегрирования является двухтактное интегрирование, называемое еще двойным, двукратным, двухшаговым и поочередным. Упрощенная структурная схема такого преобразователя приведена на рисунке 4.13, а временные диаграммы его работы показаны на рисунке 4.14.
 .
.
Начиная с момента времени t2 ко входу интегратора подключается источник постоянного образцового напряжения UЭ (см. рисунок 4.13) с полярностью, обратной полярности UХ=. Начинается второй такт интегрирования, но теперь интегрируется UЭ. Этот процесс продолжается до момента времени, когда UИ = = U0 (t3 на рисунке 4.14,б), и может быть описан уравнением  .
.
В момент времени t3 срабатывает компаратор К и образуется стоп-импульс, который через T1 останавливает ГСчИ, а через триггер Т3 размыкает ключ Кл2. Напряжение UЭ отключается от интегратора, и счетчик фиксирует количество импульсов
 .
.
Для первого такта интегрирования аналогично можно записать
 .
.
 ; т.е. при постоянных UЭ и k (например, k = 1000) значение преобразуемого напряжения равно количеству счетных импульсов. При этом результат измерения, как видно из (4.22), не зависит от стабильности параметров интегратора.
; т.е. при постоянных UЭ и k (например, k = 1000) значение преобразуемого напряжения равно количеству счетных импульсов. При этом результат измерения, как видно из (4.22), не зависит от стабильности параметров интегратора.
 .
.
34.Аналого-цифровые преобразователи, реализующие частотно-импульсный метод преобразования. Устройство, принцип действия и основные метрологические характеристики. Оценка погрешности преобразования.
 Структурная схема частотно-импульсного преобразователя
Структурная схема частотно-импульсного преобразователя
Известно большое число схем ПНЧ (пр-ль напряжение-частота). В зависимости от метода преобразования UХ= → fХ их подразделяют на две группы: с непосредственным пр-нием и с косвенным пр-нием. В ПНЧ первой группы напряжение UХ= непосредственно используется для формирования выходного сигнала частоты fХ, а в ПНЧ второй группы оно влияет на параметр, определяющий частоту выходного сигнала генератора самовозбуждения (гармонического или релаксационного). ПНЧ второй группы имеют невысокие метрологические характеристики. Поэтому основное применение в частотно-импульсных преобразователях нашли ПНЧ на основе интегрирующих звеньев с замкнутым контуром. Его структурная схема на рис.

Временные диаграммы работы преобразователя напряжение – частота
Аналого-цифровые преобразователи, реализующие кодоимпульсный метод преобразования (способ следящего уравновешивания). Устройство, принцип действия и основные метрологические характеристики. Оценка погрешности преобразования.
В АЦП, реализующих кодоимпульсный метод преобразования, измеряемая величина преобразуется в цифровой код путем последовательного сравнения ее с рядом дискретных значений известной величины, изменяющихся по определенному закону. По принципу своей работы они являются неинтегрирующими.
Уравновешивание в кодоимпульсных преобразователях может быть как развертывающим, так и следящим. При развертывающем уравновешивании UХ= сравнивается с компенсирующим напряжением UК, изменяющимся по определенной, заранее установленной и не зависящей от самого хода процесса уравновешивания программе. При следящем уравновешивании осуществляется дискретное слежение за любыми изменениями UХ=, а цифровая следящая система обеспечивает уравнивание UХ= и UК.
Аналого-цифровые преобразователи, реализующие ко до-импульсный метод преобразования (способ поразрядного уравновешивания). Устройство, принцип действия и основные метрологические характеристики. Оценка погрешности преобразования.
 В АЦП, реализующих кодоимпульсный метод преобразования, измеряемая величина преобразуется в цифровой код путем последовательного сравнения ее с рядом дискретных значений известной величины, изменяющихся по определенному закону. По принципу своей работы они являются неинтегрирующими. Уравновешивание в кодоимпульсных преобразователях может быть как развертывающим, так и следящим. При развертывающем уравновешивании UХ= сравнивается с компенсирующим напряжением UК, изменяющимся по определенной, заранее установленной и не зависящей от самого хода процесса уравновешивания программе. При следящем уравновешивании осуществляется дискретное слежение за любыми изменениями UХ=, а цифровая следящая система обеспечивает уравнивание UХ= и UК. В свою очередь развертывающее уравновешивание может быть реализовано в виде двух алгоритмов: равномерное ступенчатое увеличение (или уменьшение) UК до UХ= = UК и поразрядное уравновешивание UК и UХ=.
В АЦП, реализующих кодоимпульсный метод преобразования, измеряемая величина преобразуется в цифровой код путем последовательного сравнения ее с рядом дискретных значений известной величины, изменяющихся по определенному закону. По принципу своей работы они являются неинтегрирующими. Уравновешивание в кодоимпульсных преобразователях может быть как развертывающим, так и следящим. При развертывающем уравновешивании UХ= сравнивается с компенсирующим напряжением UК, изменяющимся по определенной, заранее установленной и не зависящей от самого хода процесса уравновешивания программе. При следящем уравновешивании осуществляется дискретное слежение за любыми изменениями UХ=, а цифровая следящая система обеспечивает уравнивание UХ= и UК. В свою очередь развертывающее уравновешивание может быть реализовано в виде двух алгоритмов: равномерное ступенчатое увеличение (или уменьшение) UК до UХ= = UК и поразрядное уравновешивание UК и UХ=.
Принципиальной особенностью преобразователей поразрядного уравновешивания является наличие цифроаналогового преобразователя(ЦАП). С его помощью реализуется ООС путем преобразования кода (например, 8421) в аналоговое напряжение UК, которое затем сравнивается с UХ= в компараторе. Это сравнение всегда начинается со старшего разряда (например, 8 В). Если при этом UК UХ=, то срабатывает компаратор и воздействует на УУ, которое снимает в ЦАП напряжение этого разряда (разряд пропускается). Далее в очередном такте подключается напряжение следующего за пропущенным разряда (2 В) и т. д. Процесс сравнения заканчивается после полного перебора всех разрядов UК в соответствии с алгоритмом развертывающего уравновешивания. Одновременно с переключением разрядов устройство управления УУ формирует двоично-десятичный код.