Полоса цифрового фильтра что это
Цифровые фильтры (Лекция)
По виду импульсной характеристики цифровые фильтры делятся на два больших класса:


Отличие КИХ – фильтров от БИХ – фильтров заключается в том, что у КИХ – фильтров выходная реакция зависит от входных сигналов, а у БИХ – фильтров выходная реакция зависит от текущего значения.
Импульсная характеристика – это реакция схемы на единичный сигнал.
Е диничный сигнал определяется следующим образом:

Таким образом, единичный сигнал только в одной точке равен единице – в точке начала координат.
Задержанный е диничный сигнал определяется следующим образом:

Таким образом, задержанный единичный сигнал задерживает на k периодов дискретизации.
Дуальность (двойственность) представления сигналов.
Все сигналы можно представить во временной или частотной плоскости.
Причем, частотных плоскостей – несколько.
Для просмотра сигнала во временной плоскости существует прибор:

Представим, что здесь есть достаточно длинный синусоидальный сигнал (в 1 сек. 1000 раз повторилась синусоида):

Возьмем сигнал с частотой, в два раза больше:

Сложим эти сигналы. Получим не синусоиду, а искаженный сигнал:

Преобразования из временной плоскости в частотную плоскость производятся с помощью преобразований Фурье.
Для просмотра сигнала в частотной плоскости существует прибор:

Частота циклическая или круговая (  f ).
f ).
Частотная плоскость покажет засечку:

Величина засечки пропорциональна амплитуде синусоиды, а частота:
f 1 = 
Для второго сигнала частотная область покажет другую засечку:

Во временной области суммарного сигнала появится 2 засечки:


Оба представления сигнала равноценны и пользуются либо первым, либо другим представлением, в зависимости от того, какой удобней.
Преобразования из временной плоскости в частотную плоскость может производиться различными путями. Например: с помощью преобразований Лапласа или с помощью преобразований Фурье.
Три формы записи рядов Фурье.
Существует три формы записи рядов Фурье:

Входящие в формулу кратные частоты kω 1 называются гармониками; гармоники нумеруются в соответствии с индексом k ; частота ωk = kω 1называется k-й гармоникой сигнала.
Это выражение говорит о следующем: что любую периодическую функцию можно представить в виде суммы гармоник, где:

где T – период повторений этой функции;

где t – текущее время;
При разложении по Фурье самое главное – это периодичность. За счет неё происходит дискретизация по частоте, начинается некоторое количество гармоник.
Три формулы Эйлера для определения коэффициентов:
 ;
;  ;
; 
Формулы Эйлера не нуждаются ни в каких доказательствах. Эти формулы точные при бесконечном количестве гармоник. Ряд Фурье – усеченный ряд, т.к. нет бесконечного количества гармоник. Коэффициент усеченного ряда вычисляется по тем же формулам, что и для полного ряда. В этом случае, средняя квадратичная ошибка – минимальна.
Мощность гармоник падает с увеличением их номера. Если добавить/отбросить некоторые гармонические составляющие, то перерасчет остальных членов (других гармоник) не требуется.
Практически все функции являются четными или нечетными:


Четная функция симметрична относительно
Если функция четная, то все синусные коэффициенты bk будут равны нулю и в формуле ряда Фурье будут присутствовать только косинусные слагаемые.


Нечетная функция симметрична относительно центра.
Если функция нечетная, то все косинусные коэффициенты ak будут равны нулю и в формуле ряда Фурье будут присутствовать только синусные слагаемые.
2.) Вещественная форма записи ряда Фурье.
Некоторое неудобство синусно-косинусной формы ряда Фурье состоит в том, что для каждого значения индекса суммирования k (т.е. для каждой гармоники с частотой kω 1) в формуле фигурирует два слагаемых – синус и косинус. Воспользовавшись формулами тригонометрических преобразований, сумму этих двух слагаемых можно трансформировать в косинус той же частоты с иной амплитудой и некоторой начальной фазой:
 ;
; 

Если bk = 0, тогда tg φ = 0 и угол φ = 0
Если ak = 0, тогда tg φ – бесконечен и угол φ = 
В этой формуле может быть и минус (смотря какое направление взято).
3.) Комплексная форма записи ряда Фурье.
Данная форма представления ряда Фурье является, пожалуй, наиболее употребимой в радиотехнике. Она получается из вещественной формы представлением косинуса в виде полусуммы комплексных экспонент (такое представление вытекает из формулы Эйлера e jθ = Cosθ + jSinθ ):

Применив данное преобразование к вещественной форме ряда Фурье, получим суммы комплексных экспонент с положительными и отрицательными показателями:

А теперь будем трактовать экспоненты со знаком «минус» в показателе как члены ряда с отрицательными номерами. В рамках этого же общего подхода постоянное слагаемое a 0/2 станет членом ряда с нулевым номером. В результате получится комплексная форма записи ряда Фурье :

Формула расчета коэффициентов Ck ряда Фурье:

Совокупность амплитуд гармоник ряда Фурье часто называют амплитудным спектром, а совокупность их фаз – фазовым спектром.
Спектром амплитуд является действительная часть коэффициентов Ck ряда Фурье:
Re ( Ck ) – спектр амплитуд.
Спектр прямоугольных сигналов.

Данный сигнал является четной функцией, поэтому для его представления удобнее использовать синусно-косинусную форму ряда Фурье – в ней будут присутствовать только косинусные слагаемые ak , равные:

Из формулы видно, что длительность импульсов и период их следования входят в нее не обособлено, а исключительно в виде отношения. Этот параметр – отношение периода к длительности импульсов – называют скважностью последовательности импульсов и обозначают буквой: g : g = T /τ. Введем этот параметр в полученную формулу для коэффициентов ряда Фурье, а затем приведем формулу к виду Sin ( x )/ x :

При такой форме записи становится хорошо видно, чему равно значение постоянного слагаемого ряда: поскольку при x → 0 Sin ( x )/ x →1, то

Теперь можно записать и само представление последовательности прямоугольных импульсов в виде ряда Фурье:

График функции Sin ( x )/ x имеет лепестковый характер. Говоря о ширине этих лепестков, следует подчеркнуть, что для графиков дискретных спектров периодических сигналов возможны два варианта градуировки горизонтальной оси – в номерах гармоник и в частотах.

На рисунке градуировка оси соответствует номерам гармоник, а частотные параметры спектра нанесены на график с помощью размерных линий.
Итак, ширина лепестков, измеренная в количестве гармоник, равна скважности последовательности (при k = ng имеем Sin ( π k / g ) = 0, если n ≠ 0). Отсюда следует важное свойство спектра последовательности прямоугольных импульсов – в нем отсутствуют (имеют нулевые амплитуды) гармоники с номерами, кратными скважности.
Вывод: для любого сигнала известны его разложения в ряд Фурье. Зная τ и T можем посчитать сколько гармоник нужно, чтобы передать мощность.
Методы анализа линейных систем с постоянными коэффициентами.
Задача в постановке:
Имеется линейная система (не зависит от амплитуды сигнала):

Необходимо записать дифференциальное уравнение для этой системы.
Это типичная задача электротехники. Имеется мощный способ решения данной задачи во временной области.

Порядок уравнения зависит от числа реактивных элементов.
Может быть записано в виде системы уравнений первой степени.

Схема состоит из резистора и конденсатора
(интегрирующая цепь). На вход подали сигнал X ( t ). Определить Y вых.
UC = 
I = C 
RC + UC = X ( t )
UC – является Y выхода, поэтому: RC  + U ВЫХ. = X ( t )
+ U ВЫХ. = X ( t )
Дальнейшее решение сводится к решению сначала однородного уравнения, а затем неоднородного.
Это решение немного упрощается при переводе из временной плоскости в другую плоскость комплексной переменной. Перевод из временной плоскости в комплексную плоскость производится прямым преобразованием Лапласа.
Вычисляется разностное уравнение.
Прямое преобразование Лапласа.
Честно простой цифровой фильтр

Вы работаете с АЦП. Получаете результаты преобразования, один за одним. И замечаете, что эти результаты «скачут». А хотелось бы, чтобы стояли, как… Ну, короче, чтобы стояли!
Есть много причин, почему отсчеты АЦП могут быть нестабильны. В своей заметке я не говорю об этих причинах. Я говорю о том, как успокоить показания, получая их AS IS. И как сделать это максимально просто. При этом, возможно, не имея ни малейшего понятия о науке под названием «цифровая обработка сигналов».
Эта заметка написана в качестве полной замены предыдущей заметки. Ту лучше не читать 🙂
ПОСТАНОВКА ЗАДАЧИ
Имеется последовательность кодов, дискретно во времени представляющих физический сигнал. Мы будем говорить о последовательности кодов с АЦП. Физический сигнал и полученная последовательность кодов имеют шумы, выбросы, «болтанку» — назвать можно как угодно. Наша задача — сгладить входную последовательность, то есть, выдать выходную последовательность такую, чтобы влияние шумов было уменьшено.
При этом мы стремимся выполнить задачу максимально простыми программными средствами обычного микроконтроллера.
Более того, у нас поставлено еще одно условие. Допустим, что нам неудобно накапливать данные, а потом обрабатывать их и выдавать результат один раз на N полученных кодов. То ли буфер для данных негде организовать, то ли темп выдачи результатов должен совпадать с темпом получения кодов от АЦП, то ли еще что. Но условие поставлено.
И тут нам на помощь приходит цифровой рекурсивный фильтр, самой простой реализацией которого является фильтр первого порядка. Вот его и будем делать.
ТЕРМИНОЛОГИЯ
Мы хотим реализовать блок программной обработки кодов АЦП, на который поступают входные отсчеты, обрабатываются и преобразуются в выходные отсчеты. Вот этот блок обработки и будем называть цифровым фильтром: 
Y(n) = Alfa*Y(n-1) + Beta*X(n)
То есть, очередной отсчет Y(n) получаем путем взвешенного сложения предыдущего выходного отсчета Y(n-1) и нового входного кода X(n). При этом обычно коэффициент «усиления» фильтра желательно иметь равным 1. Для этого нужно, чтобы выполнялось
Alfa + Beta = 1
В рамках данной заметки задача расчета цифрового рекурсивного фильтра 1-го порядка состоит в нахождении коэффициентов Alfa иBeta с учетом удобства их использования в микроконтроллере (МК) для цифровой фильтрации отсчетов.
РАСЧЕТ ФИЛЬТРА


Как видим, в большей части частотной характеристики подавление шумов составляет всего 15. 30 дБ, а у второго — 20..40 дБ. Вспомним, я отмечал выше, что за пределами Fд/2 (у нас это 100 Гц) характеристика симметрична и в районе 200 Гц подавления шумов снова нет. Если нам нужно «взрослое зубастое подавление», то необходимо строить более серьезные фильтры.
Но все же, второй фильтр лучше давит помехи! А что, если частоту среза еще понизить?
И тут оказывается, что в погоне за парочкой децибел дополнительного подавления мы совсем забыли о временнОм «лице» фильтра. А давайте глянем, как реагируют эти два фильтра на ступенчатое входное воздействие (сигнала не было, а потом он вдруг стал равен 1 и таким и остался).


Что мы видим? Если говорить о времени переходного процесса, то первый фильтр (который похуже фильтрует) отрабатывает входной скачек примерно за 160 мс, а второй, наш передовик с подавлением 20. 40 дБ — почти за 800 мс. Вот так-то. Лучше фильтрация — хуже переходной процесс. Поэтому и нужно выбрать некий оптимум.
Вот, понимая это, я и предлагаю: исходить из требований по быстродействию. Задавшись временем реакции на ступенчатое входное воздействие, мы получим параметры фильтра (вот те самые Alfa иBeta), а параметры фильтрации примем уж какие получатся. Парочка децибел туды-сюды уже мало что изменят, а быстродействие будет известно.
Вот почему в качестве исходного требования я выбираю обеспечение заданного времени переходного процесса при подаче на вход ступенчатого воздействия. Рассмотрим чуть пристальнее, как же фильтр отрабатывает такой сигнал. Если дать скачек от нуля до некоторого значения, обозначенного 100%, то на выходе фильтра увидим:

Как видим, на 8-м отсчете фильтр уже отработал 90% входного воздействия, на 10-м — 95%, и так далее. Обычно принято говорить о «недоработанном», т.е. о тех 10 или 5 процентах, на которые фильтр еще «врет» к какому-то отсчету. Говорят еще, что погрешность установления выходного сигнала составляет столько-то процентов. Далее я привожу формулы для погрешности установления от 5 до 0,1%. В первом случае переходной процесс закончился «на глазок», а точности 0,1% обычно достаточно для того, чтобы считать процесс полностью законченным.
Разница между этими 5%-ым и 0,1%-ым фильтрами не столь уж велика. Я предполагаю, что все фильтры, которые будут разработаны по описываемой методике, находятся в континиуме между этими двумя крайними точками. В качестве характеристики фильтра по степени «законченности» переходного процесса введем такой параметр: Ntau — и вычислим его крайние значения:
LN(1/5%) = 2,996
LN(1/0,1%) = 6,908
Ntau = 2,996. 6,908
Смысл Ntau примерно таков: чем более жесткие требования мы предъявляем к завершенности переходного процесса, тем больше это число. Так что нижней границе значений Ntau соответствует «грубый» процесс, когда мы спешим считать отработку законченной, а верхней границе — «точный» переходной процесс.
Итак, разработчик задался временем переходного процесса Тпп, за которое фильтр отработает скачек на 95. 99,9%. Что еще нужно знать? Время выборки — тот период, с которым на вход фильтра поступают выборки и с таким же темпом с фильтра уходят результаты. Он у нас обозначен Т.
Ясно, что за время переходного процесса будет обработано много отсчетов. Сколько?
N = Тпп / Т (1)
И наша задача — выбрать значения Alfa иBeta так, чтобы уложиться в Тпп.
Оказывается, все очень просто. Должно выполняться условие:
Alfa > k
Микроконтроллер умножает 2 раза целое на целое, складывает, производит сдвиг вправо на k разрядов. Несколько микросекунд — и у вас новый отсчет выходной величины.
ПРИМЕР ДЛЯ ЦЕЛОЧИСЛЕННОЙ АРИФМЕТИКИ
Рассмотрим пример, в котором я задался N=100. Тогда условие (2) будет выглядеть так:
0,9333 > 8 (4)
На этом расчет фильтра с целочисленными коэффициентами закончен.
Коллега _pv подсказал в обсуждении хорошую запись вместо (4), полностью эквивалентую по результату:
Y(n) = Y(n-1) + [Nb*(X(n) — Y(n-1)) >> 8]
Здесь имеем экономию на одно умножение (при произвольных соотношениях между коэффициентами) и формула приобретает вид приращения старого значения Y(n) на разность между входом и выходом, умноженную на коэффициент Beta. Чем меньше этот коэффициент, тем медленнее следит выход за входом — более сильная фильтрация.
Приведу сишный код, соответствующий формуле от _pv:
Здесь учтено, что при делении (сдвиге вправо) в целочисленной арифметике теряются разряды. Поэтому промежуточный результат сохраняется в переменной z в масштабе суммы (до деления), а точнее, в масштабе выходной величины, деленной на Beta. Кстати, здесь и ответ на вопрос о необходимом диапазоне представления z: по максимальному значению выходной величины, деленному на Beta. Например, однобайтные переменные и коэффициент Nb, равный 1 (при последующем сдвиге на 8 бит, как в показанной функции) требуют двухбайтного z.
Еще один фокус — и я откланяюсь 🙂
Если не стремиться к конкретной цифре погрешности установления (0,1% или 5% или что-то еще), то можно попытаться выбросить одно умножение, выбрав меньшее из чисел Na и Nb равным 1.
В нашем примере меньшее из чисел именно Nb и легко посчитать, что оно может быть в диапазоне 8. 17. Вычислим следующие границы:
Y(n) = (15*Y(n-1) + X(n)) >> 4 (5)
Видим, что расчет (5) имеет на одну операцию умножения меньше, чем расчет (4).
РЕЗЮМЕ
Расчет простого цифрового фильтра нижних частот сводится к таким действиям:
Первое. Зададимся временем переходного процесса, периодом выборок и вычислим, за сколько выборок процесс должен закончиться (1):
N = Тпп / Т
Второе. Вычислим границы возможных значений коэффициента при Y (2):
EXP(-6,908 / N) > k
Как показано в примере, иногда можно подобрать Na или Nb, равными 1, что упрощает вычисления.
БЛАГОДАРНОСТИ
Хочу выразить искреннюю благодарность уважаемому коллеге angel5a за то, что он вернулся из детского садика (кто читал дискуссию, тот поймет) и очень помог мне с переделкой исходной заметки. Радикальной переделкой, хочу заметить.
Также в доработке статьи помогли дискуссии с коллегами _pv и известным в наших кругах товарищем avreal, выступившим на ненашем форуме.
Владимир Леонидов
Визитная карточка
Цифровые фильтры — конспект лекции
Введение
Цифровой фильтр – фильтр, обрабатывающий цифровой сигнал с целью выделения и (или) подавления определённых частот этого сигнала.
Зачем они нужны? Чем нас не устраивают аналговые фильтры? Давайте рассмотрим преимущества и недостатки цифровых фильтров.
Преимущества цифровых фильтров:
Недостатки цифвровых фильтров:
Начнём изучение фильтров с наиболее простого типа — КИХ-фильтров.
КИХ-фильтры
Теперь создадим сам синусоидальный сигнал x с частотой 0.5 Гц, зашумлённый случайным сигналом, амплитуда которого изменяется в диапазоне от a=-0.01 до b=0.1 :
Построим график сигнала x :
И получим результат:
 Сгенерированный сигнал x(n)
Сгенерированный сигнал x(n)
А теперь построим сигналы x и y друг под другом в одном окне:
Результаты выполнения получившегося скрипта показаны ниже:
 Результаты работы фильтра “скользящее среднее”
Результаты работы фильтра “скользящее среднее”
И что же мы видим? Сигнал y(n) (на рисунке снизу) похож на сигнал x(n) (сверху), однако имеет некоторую задержку и более гладкую форму. Получается, что мы только что применили к сигналу x(n) фильтр нижних частот (ФНЧ)! Спроектированный нами фильтр называется скользящее среднее. Уравнение данного фильтра имеет вид:
(1) 
А его структурная схема выглядит так:
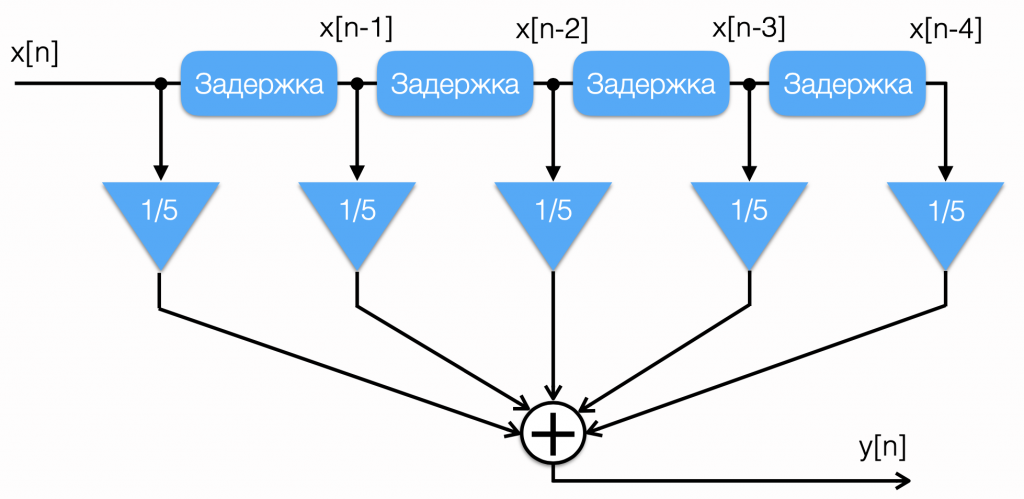 Структурная схема фильтра “скользящее среднее состоящего из пяти отсчётов
Структурная схема фильтра “скользящее среднее состоящего из пяти отсчётов
В каждый момент времени берётся текущий отсчёт и 4 предыдущих, каждый из которых домножается на коэффициент 1/5, затем эти результаты складываются и полученная сумма поступает на выход. Процедура повторяется, пока весь сигнал не будет обработан.
Свёртка
А что, если вместо коэффициентов 1/5 взять что-то другое? На самом деле, уравнение (1) представляет собой частный случай операции свёртки:
(2) 
где  ,
,  — длина
— длина  ,
,  — длина
— длина 
Это уравнение и является уравнением КИХ-фильтра. Его структурная схема выглядит так:
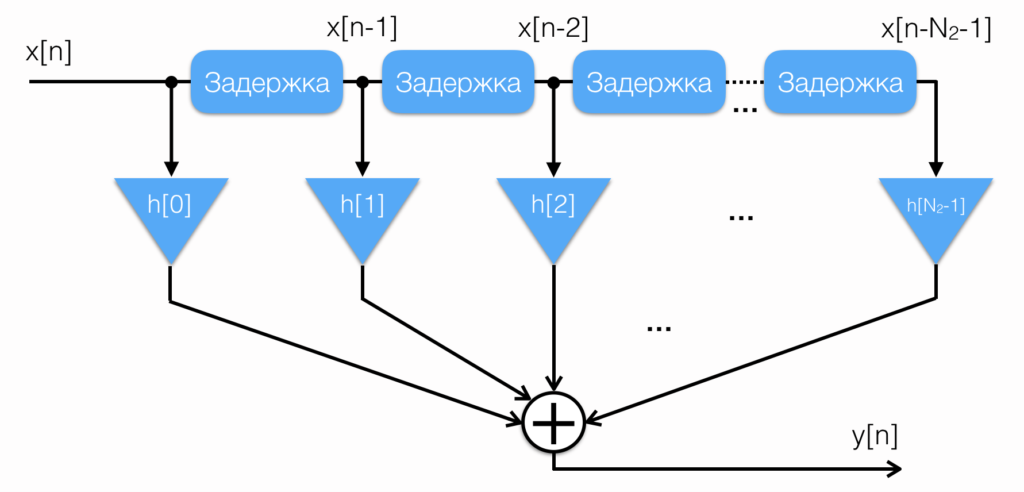 Структурная схема КИХ-фильтра
Структурная схема КИХ-фильтра
Теорема о свёртке
Со свёрткой связана следующая теорема:
Если две последовательности во временной области
и
 и
и  соответственно, то ДПФ свёртки
соответственно, то ДПФ свёртки  представляет собой произведение
представляет собой произведение  :
: (3) 
И действует это в обе стороны. Получается, что, когда мы делаем свёртку исходного сигнала с коэффициентами фильтра, мы перемножаем амплитудно-частотную характеристику (АЧХ) исходного сигнала и АЧХ фильтра, тем самым убираем ненужные частоты. А это и есть фильтрация.
Мы выше говорили: “фильтры с конечной импульсной характеристикой, фильтры с бесконечной импульсной характеристикой”. А что же такое “импульсная характеристика”? Давайте вспомним на примере фильтров.
Импульсная характеристика КИХ-фильтра
Импульсная характеристика фильтра — это выходная последовательность фильтра во временной области при подаче на вход фильтра дельта-функции, или функции Дирака — единственного отсчёта, равного единице (единичного импульса), которому предшествуют и за которым следуют нулевые отсчёты.
Возьмём предыдущий пример из Matlab и вместо исходного сигнала x подставим в него функцию Дирака:
Результат выполнения скрипта показан ниже:
 Функция Дирака и реакция на неё скользящего среднего из пяти отсчётов
Функция Дирака и реакция на неё скользящего среднего из пяти отсчётов
Из рисунка видно, что импульсная характеристика фильтра представляет собой 5 отсчётов амплитудой 0.2 (или 1/5). Получается, что мы с вами видим ни что иное, как коэффициенты фильтра. Поэтому коэффициенты КИХ-фильтра также называют его импульсной характеристикой.
Проектирование КИХ-фильтров
Теперь возникает вопрос: как рассчитать коэффициенты, чтобы получить требуемую АЧХ фильтра? Самый простой способ: “рисуем” необходимую АЧХ в частотной области, делаем обратное ДПФ от этой АЧХ и получаем набор коэффициентов во временной области. Наверняка, каждый из вас мечтает увидеть фильтр с идеально прямоугольной АЧХ. Возможно ли такое? Давайте разбираться. Что из себя представляет ДПФ от идеально прямоугольного сигнала? Правильно, функцию  , которую мы рассматривали, когда изучали растекание спектра ДПФ:
, которую мы рассматривали, когда изучали растекание спектра ДПФ:
 Функция
Функция
Результат выполнения скрипта показан ниже:
 Требуемая форма АЧХ фильтра x(n) и 200 центральных отсчётов его импульсной характеристики y(n)
Требуемая форма АЧХ фильтра x(n) и 200 центральных отсчётов его импульсной характеристики y(n)
Результат выполнения скрипта показан ниже:
 Форма АЧХ фильтра в зависимости от количества отсчётов
Форма АЧХ фильтра в зависимости от количества отсчётов
Из графиков видно, что, чем больше мы используем отсчётов нашего фильтра (а количество отсчётов – это порядок цифрового фильтра), тем более его характеристика становится похожа на идеальную. Однако, стоит обратить внимание, что на вершине АЧХ всех наших фильтров видны пульсации независимо от того, сколько используется отсчётов в импульсной характеристике. Эти пульсации называются пульсации Гиббса и возникают из-за медленной сходимости ряда Фурье, которая обусловлена наличием разрыва функции на частоте среза полосы пропускания фильтра. С увеличением числа отсчетов уменьшается длительность выбросов на вершине АЧХ, но их амплитуда не меняется и составляет примерно 9% от амплитуды АЧХ на частоте среза.
Окна при проектировании КИХ-фильтров
Запишем выражение (3) следующим образом:
(4) 
Получается, что, когда мы берём какое-то ограниченное количество отсчётов от импульсной характеристики идеального фильтра, мы умножаем эту импульсную характеристику на прямоугольное окно, спектр которого мы рассматривали выше. Эта процедура во временной области эквивалентна свёртке спектра идеальной характеристики и спектра ограниченной импульсной характеристики в частотной области. Ниже приведён листинг, моделирующий выражение (4):
Результат выполнения скрипта показан ниже:
 Результаты моделирования выражения (4)
Результаты моделирования выражения (4)
Чтобы уменьшить амплитуду пульсаций, как и в случае с ДПФ, при проектировании КИХ-фильтров используют окна, отличные от прямоугольного. Давайте модифицируем наш листинг “Анализ АЧХ фильтра, часть 4” и добавим в строчках 26, 34, 42, 50 умножение на окно Хэмминга:
Полученные результаты показаны ниже:
 Форма АЧХ фильтра, взвешенного окном, в зависимости от количества отсчётов
Форма АЧХ фильтра, взвешенного окном, в зависимости от количества отсчётов
Другое дело! Пульсации ушли, однако АЧХ фильтра стала более “заваленной”. Выбор типа окна зависит от конкретной решаемой задачи. Самые распространённые: параметрическое окно Кайзера, Чебышёва, окно Блэкмана, Хэмминга и др.
БИХ-фильтры
Основное отличие в структуре БИХ-фильтра от КИХ-фильтра — наличие обратной связи. Что такое обратная связь? Это когда на вход устройства подаётся сигнал, пропорциональный сигналу на его выходе. Таким образом, значение выходного сигнала БИХ-фильтра зависит не только от текущего и предыдущего значения входного сигнала, но и от предыдущего значения выходного сигнала. Это одновременно и плюс, и минус: наличие обратной связи позволяет значительно сократить количество отсчётов (а значит, и порядок фильтра, а как следствие – количество умножений), однако может привести к неустойчивости его работы, или вообще превратить фильтр в генератор. Из-за того, что при отсутствии входного сигнала на выходе БИХ-фильтра может генерироваться бесконечное количество отсчётов, его и прозвали фильтром с бесконечной импульсной характеристикой.
Давайте на примере сравним, сколько же потребуется коэффициентов КИХ- и БИХ-фильтра для реализации одинаковой АЧХ. Спроектируем с помощью filterDesigner два ФНЧ со следующими параметрами:
В результате получили два фильтра, АЧХ и ФЧХ которых представлены ниже:
 АЧХ и ФЧХ КИХ-фильтра АЧХ и ФЧХ КИХ-фильтра |  АЧХ и ФЧХ БИХ-фильтра АЧХ и ФЧХ БИХ-фильтра |
Из рисунка видно, что АЧХ фильтров действительно схожи, однако, для реализации КИХ-фильтра нам потребовалось 222 коэффициента, а для реализации БИХ-фильтра — всего 41. Получается, что в случае с БИХ-фильтром, операций умножения требуется в 5 раза меньше.
Следует также обратить внимание на график фазы. У КИХ-фильтров ФЧХ гарантированно линейная, у БИХ-фильтров она гарантированно нелинейная, о чём нужно помнить.
Рассмотрим структуру БИХ-фильтра:
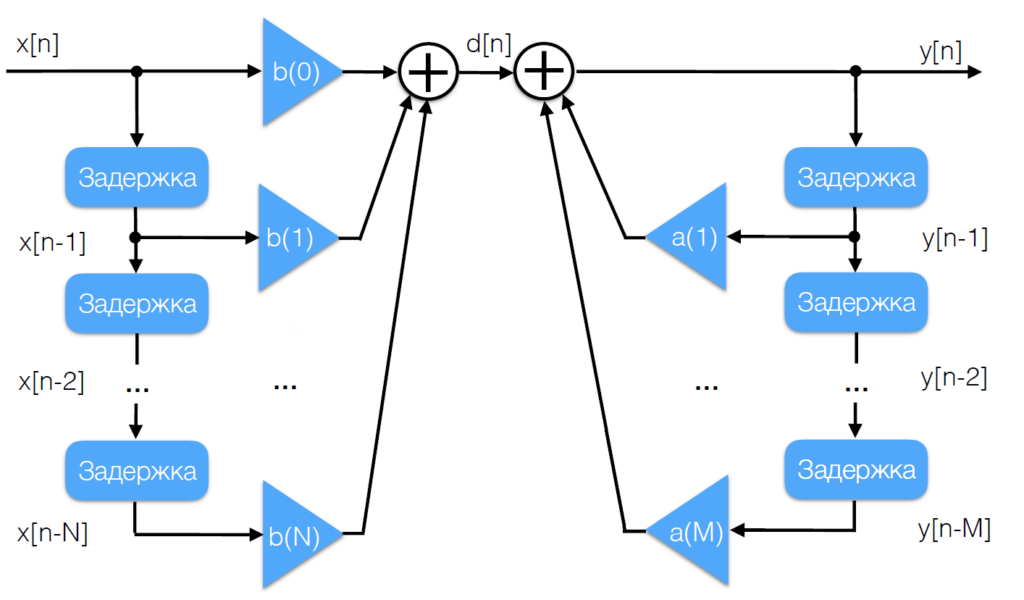 Структурная схема БИХ-фильтра
Структурная схема БИХ-фильтра
Он состоит из двух частей: прямой и обратной связи. Прямая связь повторяет структурную схему КИХ фильтра, обратная связь напоминает зеркальную копию прямой связи.
Таким образом, разностное уравнение БИХ-фильтра имеет вид:
(5) 
При проектировании БИХ-фильтров используют z-преобразование, корни которого идут от преобразования Лапласа. Второе преобразование вам точно знакомо, его должны были изучать на курсе математического анализа. Давайте вспомним, что это такое, а затем перейдём к изучению z-преобразования. Но это на следующей лекции.